SPJ|CBS:上交大团队研发软体电液鳍驱动两栖机器人:三种运动模态自如切换!
ScienceAAAS
2025-07-29 15:15
文章摘要
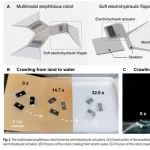
上海交通大学研究团队研发了一款多模态两栖软体机器人,采用软电液执行器作为核心技术,能够在陆地和水中环境之间自如切换,无需结构改造。该机器人具有三种运动模式:陆地爬行、水下爬行和水中游泳,并且在极端温度环境下(2.1°C至61.3°C)仍能保持运动能力。研究团队通过优化设计和多层防水工艺,确保了机器人在复杂环境中的稳定工作。此外,理论建模和性能优化进一步提升了机器人的运动效率和可靠性,使其在环境监测、搜索救援等领域具有广阔的应用前景。
本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者速来电或来函联系。
推荐文献

Screening apelin analogues and a small molecule agonist as effective cardiovascular therapeutics against reperfusion injury
DOI: 10.1039/D5MD00985E
Pub Date : 2025-12-19
")
Sensorimotor Integration by Targeted Priming in Muscles with Electromyography-Driven Electro-vibro-feedback in Robot-Assisted Wrist/Hand Rehabilitation after Stroke.
DOI: 10.34133/cbsystems.0507
Pub Date : 2026-01-27
Date: 2026/1/1 0:00:00

Rapidly Expandable Zeolite-Poly(vinyl Alcohol) Sponge for Fast Bleeding Control in Severe Femoral Artery Hemorrhage.
DOI: 10.1021/acsabm.5c01904
Pub Date : 2026-02-06
ScienceAAAS

SPJ|王振常院士团队:基于U-HRCT和三维几何信息解析实现听小骨自动测量与量化分析.
2025-12-26

陆军军医大学等联合团队|面向癫痫精准治疗的脑网络调控新范式:个体化靶点识别与干预.
2025-12-26

SPJ|OLAR海陆气研究:全球海洋资料同化与预报系统(YHGO).
2025-12-25

上海交大附属九院:HDAC5-ACTN4信号轴揭示慢性创面再上皮化的新治疗靶点.
2025-12-25

SPJ|ADI综述:当成像系统学会"学习":化物理不确定性为数字智能.
2025-12-23
最新文章


王春生,Nature Energy+1!
10小时前



