研究进展:仿生轨迹调制-防滑抓取 | Nature Machine Intelligence
今日新材料
2025-07-27 11:30
文章摘要
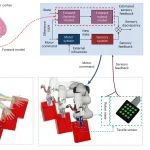
本研究提出了一种基于生物启发的机器人滑移控制新策略,通过轨迹调制替代传统的握力调节方法,以提高机器人操作的稳定性和适应性。研究背景在于机器人操作过程中打滑控制的重要性,传统方法依赖于抓力调节,但存在局限性。研究目的是开发一种基于轨迹调制的滑动控制策略,并比较其与传统方法的性能。实验结果表明,轨迹调制在特定情况下显著优于抓地力控制,特别是在搬运易碎物等场景中,物体旋转角度降低35%,滑移发生率下降63%。研究结论突出了鲁棒滑动控制策略的应用潜力,并展示了该方法在动态和非结构化环境中的有效性。
本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者速来电或来函联系。
推荐文献

Issue Information
DOI: 10.1002/rob.70145
Pub Date : 2025-12-17

Fatigue Detection with Multimodal Physiological Signals via Uncertainty-Aware Deep Transfer Learning
DOI: 10.1007/s42235-025-00827-0
Pub Date : 2026-01-13

On the troubling rise of generative AI suspicion in academic publishing
DOI: 10.1038/s42256-026-01178-z
Pub Date : 2026-01-30
今日新材料





最新文章




