Bioinspired trajectory modulation for effective slip control in robot manipulation
IF 23.9
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
Abstract
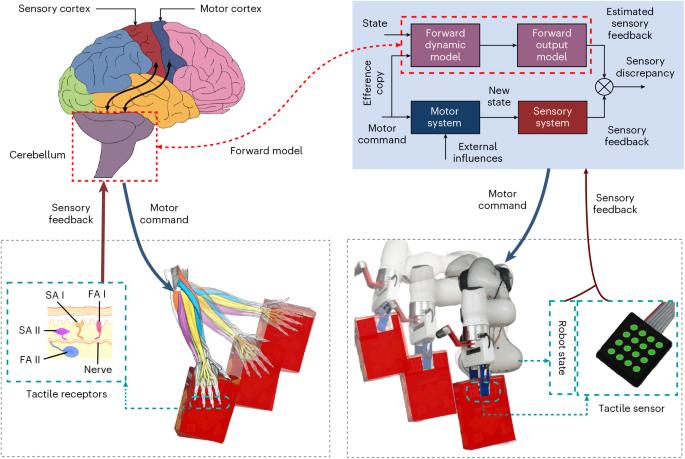
Ensuring a stable grasp during robotic manipulation is essential for dexterous and reliable performance. Traditionally, slip control has relied on grip force modulation. Here we show that trajectory modulation provides an effective alternative for slip prevention in certain robotic manipulation tasks. We develop and compare a slip control policy based on trajectory modulation with a conventional grip-force-based approach. Our results demonstrate that trajectory modulation can significantly outperform grip force control in specific scenarios, highlighting its potential as a robust slip control strategy. Furthermore, we show that, similar to humans, incorporating a data-driven action-conditioned forward model within a model predictive control framework is key to optimizing trajectory modulation for slip prevention. These findings introduce a predictive control framework leveraging trajectory adaptation, offering a new perspective on slip mitigation. This approach enhances grasp stability in dynamic and unstructured environments, improving the adaptability of robotic systems across various applications. When a robot grips and moves a delicate object, it can slip from grasp. Instead of gripping the object with more force, a method is proposed here to move the object in a way that prevents slippage.
仿生轨迹调制在机器人操作中的有效滑移控制
在机器人操作过程中,确保稳定的抓握对于灵巧和可靠的性能至关重要。传统上,滑移控制依赖于抓地力调制。在这里,我们表明轨迹调制为某些机器人操作任务中的防滑提供了有效的替代方案。我们开发了一种基于轨迹调制的滑移控制策略,并将其与传统的基于握力的方法进行了比较。我们的研究结果表明,在特定情况下,轨迹调制可以显著优于握力控制,突出了其作为鲁棒滑移控制策略的潜力。此外,我们表明,与人类相似,在模型预测控制框架中结合数据驱动的动作条件正向模型是优化防滑轨迹调制的关键。这些研究结果引入了一种利用轨迹适应的预测控制框架,为减少滑移提供了新的视角。这种方法增强了在动态和非结构化环境中的抓取稳定性,提高了机器人系统在各种应用中的适应性。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Nature Machine Intelligence
Multiple-
CiteScore
36.90
自引率
2.10%
发文量
127
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


