《Adv. Mater.》:液晶弹性体光纤人工肌肉的多模态驱动与精确控制
纤维说
2025-11-28 17:19
文章摘要
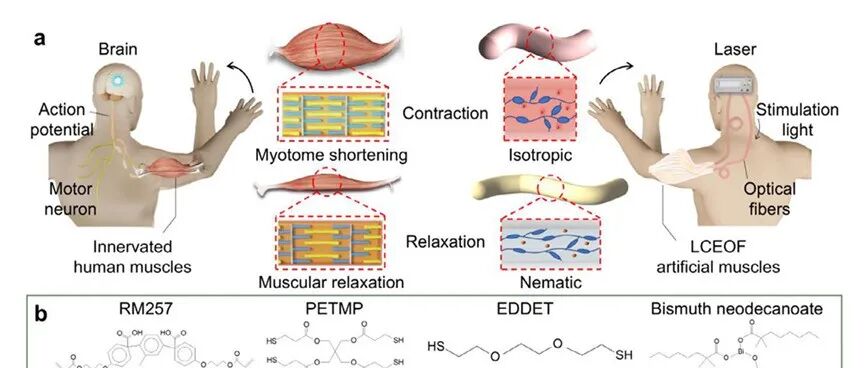
背景:人工肌肉在软体机器人和生物医学设备领域具有重要应用价值,但传统光驱动器依赖自由空间侧向照明,在受限环境中难以实现多方向驱动与精细操控。研究目的:受神经肌肉系统启发,本研究开发了一种新型液晶弹性体光纤人工肌肉,通过集成光波导与驱动功能,旨在实现多模态驱动与精确控制。结论:制备的液晶弹性体光纤具有低传输损耗和高取向有序性,可实现超过40%的收缩应变、180°扭转和360°全向弯曲。通过成束集成构建的人工臂和机器人系统,在受限环境中成功完成了物体抓取、激光刻写等复杂任务,为智能驱动器发展提供了新方向。
本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者速来电或来函联系。
推荐文献

High-Strength and Weavable Smart Nanoyarn Fabric for Unconstrained Ballistocardiogram Monitoring in Home Settings
DOI: 10.1021/acsaelm.5c02621
Pub Date : 2026-03-24
Date: 2026/3/11 0:00:00

Gap-Filling and Crystallization Kinetics Regulation in VTD/Spray Hybrid Perovskite Solar Cells
DOI: 10.1021/acsaem.6c00321
Pub Date : 2026-03-23
Date: 2026/3/3 0:00:00

A Biomimetic Nanomachine Reprograms Transmembrane ATP Flux to Induce Tumor-Selective Bioenergetic Crisis.
DOI: 10.1002/adma.202522412
Pub Date : 2026-03-31
纤维说
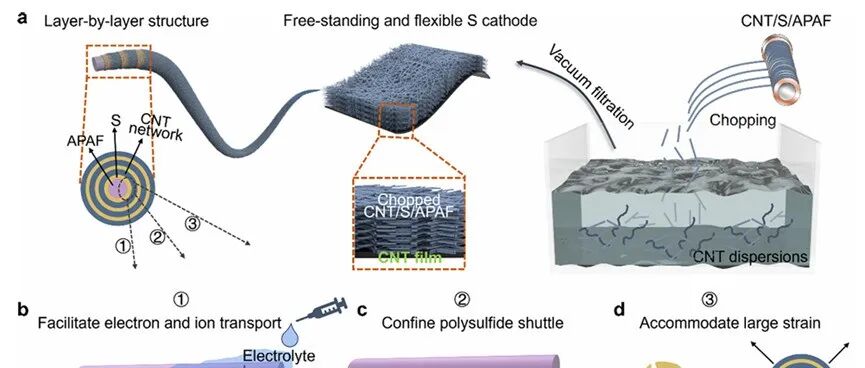
《JACS》:调控电子与离子导电框架用于高能量密度锂硫电池.
2025-11-06
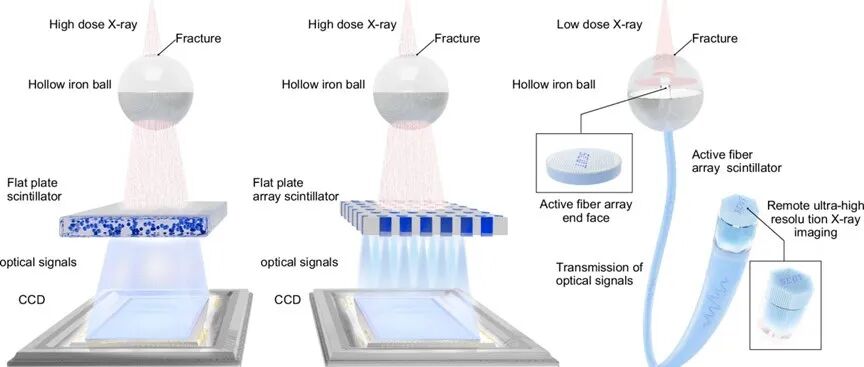
《Nat. Commun.》:高分辨率的集束纤维X射线成像.
2025-10-08
《Sci. Robot.》:通过增加压力预防压疮:交替压力床垫.
2025-08-21
最新文章
《Adv. Mater.》:液晶弹性体光纤人工肌肉的多模态驱动与精确控制
2025-11-28
《JACS》:调控电子与离子导电框架用于高能量密度锂硫电池
2025-11-06
《Nat. Commun.》:高分辨率的集束纤维X射线成像
2025-10-08

