深圳大学李辉npj Flexible Electronics:驱感一体仿生磁驱软体机器人
BioMed科技
2025-06-25 19:00
文章摘要
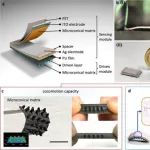
本文介绍了深圳大学李辉副教授团队开发的一种具有自主感知能力的驱感一体仿生磁驱软体机器人。研究背景指出软体机器人在狭窄空间作业中具有优势,但面临驱动响应慢和感知功能集成困难的问题。研究目的是通过仿生学设计和磁驱动力学结合,解决这些技术瓶颈。研究采用创新的微喷打印与磁场诱导协同制造工艺,实现了微米级精密微锥结构的快速成型,并开发了基于机器学习的智能感知系统。研究结论表明,该机器人系统成功解决了小型化、功能集成和环境适应性等关键技术问题,为工业检测和医疗微创等领域的应用提供了创新技术方案。
本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者速来电或来函联系。
推荐文献

Corroborating the Monro-Kellie Principles.
DOI: 10.1007/s12028-022-01624-x
Pub Date : 2026-02-01
Date: 2022/10/31 0:00:00

Issue Editorial Masthead
DOI: 10.1021/aev009i002_2032701
Pub Date : 2026-01-26

Breathable nanomesh electrodes with improved water resistance and stretchability for skin impedance monitoring
DOI: 10.1038/s41528-026-00542-8
Pub Date : 2026-02-03
BioMed科技

用蜂蜜做水凝胶,发了一篇《AFM》!.
2025-12-31



中山大学《CEJ》:纳米羟基磷灰石固定多肽,促进感染性骨再生.
2025-12-30

负载Netrin-1的GelMA水凝胶加速糖尿病伤口原位愈合.
2025-12-30
最新文章


陕西师范大学闫亚平/张娅玲合作最新Cell子刊
15小时前



