CJPS| 北航杨继萍/王志坚教授课题组研究论文:基于液态金属-液晶弹性体复合材料的爬行-翻滚软体机器人
中国高分子
2025-03-20 12:00
文章摘要
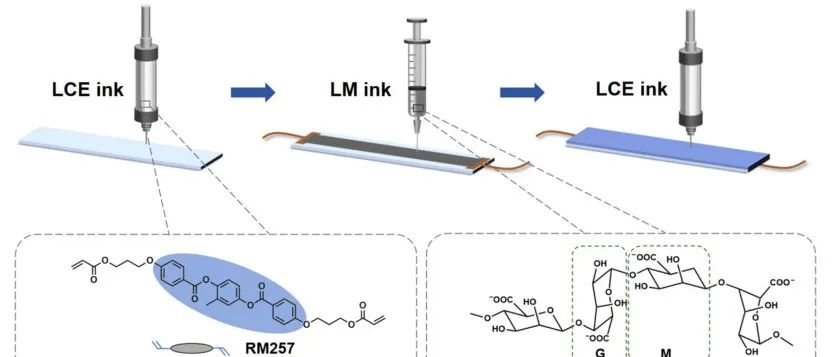
本文介绍了北京航空航天大学杨继萍/王志坚教授课题组的研究成果,他们利用液态金属-液晶弹性体复合材料通过3D打印技术制备了一种新型软驱动器,并开发了具有爬行和翻滚两种运动模式的软体机器人。研究背景基于软机器人在人机交互、野外勘探等领域的应用潜力,以及液晶弹性体作为智能软材料的优势。研究目的是探索不同打印参数对复合材料性能的影响,并设计出能够通过调节输入电压改变运动模式的软体机器人。实验结果表明,通过调节输入电压可以有效控制驱动器的弯曲角度和速度,从而实现机器人的不同运动模式。该研究为软体机器人的设计和应用提供了新的思路和方法。
本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者速来电或来函联系。
中国高分子

中科院宁波材料所陈涛、乐晓霞团队 | 智能聚合物凝胶信息存储材料在防伪领域的研究进展.
2025-12-31

功能高分子学报 | 2025年度封面文章汇总.
2025-12-31

聚合新篇,链动未来 | 高分子三刊编辑部祝您新年快乐,科研花开!.
2025-12-30

高分子通报2025年度最美封面评选.
2025-12-30

快来投票!高分子学报2025年度最美封面评选等你来.
2025-12-30
最新文章

《AM》西南交通大学:面向下一代个性化医疗的离子水凝胶传感器
2026-01-23

沸腾!金属有机框架(MOFs)基水凝胶的最新研究进展,破百年难题!
2026-01-23

《AFM》燕山大学张强:筋膜仿生核壳纳米纤维水凝胶,具有免疫调节与疤痕抑制双重功效!
2026-01-22


