{"title":"基于观测器的CACC车辆排抗DoS攻击弹性控制","authors":"Xiao Tan, Bin Liu, Jingzhao Chen, Zheng Jiang","doi":"10.1007/s42154-023-00218-3","DOIUrl":null,"url":null,"abstract":"<div><p>Cooperative adaptive cruise control (CACC) is an important technology for improving road utilization and energy efficiency in the automotive industry. In CACC systems, connected vehicles can receive information from adjacent ones through communication networks. However, the networks are vulnerable to cyber-attacks, so the states of vehicles cannot be received promptly and accurately. This paper studies the security resilience control for a CACC system subject to denial of service (DoS) attack. The core of the proposed resilient control strategy is to estimate the delay caused by DoS attack and then compensate for it in the controller. Specifically, a CACC system is modeled by considering the impacts of DoS attack on the transmitted data. Then, a high-gain observer is presented to estimate the vehicle states including the time delay. The convergence of the observer is proved in a theorem based on the Lyapunov stability theory, and the high-gain-velocity observer is modified so that the estimation error of the velocity can converge to zero in a finite time. A resilient controller is designed by proposing a time delay compensation algorithm to mitigate the impacts of DoS attack. The effectiveness of the estimation and control methods is illustrated by a ten-vehicle simulation system operating at the FTP75 driving cycle conditions. And the relative estimation errors are less than 6%.</p></div>","PeriodicalId":36310,"journal":{"name":"Automotive Innovation","volume":"6 2","pages":"176 - 189"},"PeriodicalIF":5.0000,"publicationDate":"2023-04-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"1","resultStr":"{\"title\":\"Observer-Based Resilient Control of CACC Vehicle Platoon Against DoS Attack\",\"authors\":\"Xiao Tan, Bin Liu, Jingzhao Chen, Zheng Jiang\",\"doi\":\"10.1007/s42154-023-00218-3\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Cooperative adaptive cruise control (CACC) is an important technology for improving road utilization and energy efficiency in the automotive industry. In CACC systems, connected vehicles can receive information from adjacent ones through communication networks. However, the networks are vulnerable to cyber-attacks, so the states of vehicles cannot be received promptly and accurately. This paper studies the security resilience control for a CACC system subject to denial of service (DoS) attack. The core of the proposed resilient control strategy is to estimate the delay caused by DoS attack and then compensate for it in the controller. Specifically, a CACC system is modeled by considering the impacts of DoS attack on the transmitted data. Then, a high-gain observer is presented to estimate the vehicle states including the time delay. The convergence of the observer is proved in a theorem based on the Lyapunov stability theory, and the high-gain-velocity observer is modified so that the estimation error of the velocity can converge to zero in a finite time. A resilient controller is designed by proposing a time delay compensation algorithm to mitigate the impacts of DoS attack. The effectiveness of the estimation and control methods is illustrated by a ten-vehicle simulation system operating at the FTP75 driving cycle conditions. And the relative estimation errors are less than 6%.</p></div>\",\"PeriodicalId\":36310,\"journal\":{\"name\":\"Automotive Innovation\",\"volume\":\"6 2\",\"pages\":\"176 - 189\"},\"PeriodicalIF\":5.0000,\"publicationDate\":\"2023-04-04\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Automotive Innovation\",\"FirstCategoryId\":\"1087\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s42154-023-00218-3\",\"RegionNum\":1,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Automotive Innovation","FirstCategoryId":"1087","ListUrlMain":"https://link.springer.com/article/10.1007/s42154-023-00218-3","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Observer-Based Resilient Control of CACC Vehicle Platoon Against DoS Attack
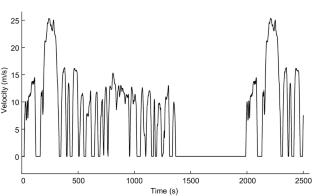
Cooperative adaptive cruise control (CACC) is an important technology for improving road utilization and energy efficiency in the automotive industry. In CACC systems, connected vehicles can receive information from adjacent ones through communication networks. However, the networks are vulnerable to cyber-attacks, so the states of vehicles cannot be received promptly and accurately. This paper studies the security resilience control for a CACC system subject to denial of service (DoS) attack. The core of the proposed resilient control strategy is to estimate the delay caused by DoS attack and then compensate for it in the controller. Specifically, a CACC system is modeled by considering the impacts of DoS attack on the transmitted data. Then, a high-gain observer is presented to estimate the vehicle states including the time delay. The convergence of the observer is proved in a theorem based on the Lyapunov stability theory, and the high-gain-velocity observer is modified so that the estimation error of the velocity can converge to zero in a finite time. A resilient controller is designed by proposing a time delay compensation algorithm to mitigate the impacts of DoS attack. The effectiveness of the estimation and control methods is illustrated by a ten-vehicle simulation system operating at the FTP75 driving cycle conditions. And the relative estimation errors are less than 6%.
期刊介绍:
Automotive Innovation is dedicated to the publication of innovative findings in the automotive field as well as other related disciplines, covering the principles, methodologies, theoretical studies, experimental studies, product engineering and engineering application. The main topics include but are not limited to: energy-saving, electrification, intelligent and connected, new energy vehicle, safety and lightweight technologies. The journal presents the latest trend and advances of automotive technology.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


