Danesh Shokri, Heidar Rastiveis, Wayne A. Sarasua, Saeid Homayouni, Benyamin Hosseiny, Alireza Shams
{"title":"基于点云的电力线检测增强描述子提取算法","authors":"Danesh Shokri, Heidar Rastiveis, Wayne A. Sarasua, Saeid Homayouni, Benyamin Hosseiny, Alireza Shams","doi":"10.1111/1745-5871.12604","DOIUrl":null,"url":null,"abstract":"<p>Mobile terrestrial laser scanning (MTLS) systems provide a safe and efficient means to survey roadway corridors at high speed. MTLS point clouds are rich in planimetric data. However, manual extraction of useful information from these point clouds can be time consuming and laborious and automated object extraction from MTLS point clouds has become a hot topic in the remote sensing community. This study proposes an automated method for power line extraction from MTLS point clouds based on a multilayer perceptron (MLP) neural network. The proposed method consists of three main steps: (i) point cloud preprocessing, (ii) descriptor extraction and selection, and (iii) point classification. The preprocessing step involves filtering out more than 90% of the point cloud by eliminating the vast majority of unneeded points. Next, various descriptors are extracted from the remaining points including planarity, linearity, and verticality, and the descriptor standard deviation is used to select the best-suited descriptors for power line extraction. Finally, an MLP neural network is trained using the selected descriptors from several cable and noncable sample points. The proposed algorithm was evaluated in three MTLS point clouds in urban and nonurban environments totalling 5.5 kilometres in length. An average precision of 94% and a recall of 94% showed the algorithm’s reliability and feasibility.</p>","PeriodicalId":47233,"journal":{"name":"Geographical Research","volume":"61 4","pages":"480-502"},"PeriodicalIF":2.7000,"publicationDate":"2023-05-29","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"1","resultStr":"{\"title\":\"An enhanced descriptor extraction algorithm for power line detection from point clouds\",\"authors\":\"Danesh Shokri, Heidar Rastiveis, Wayne A. Sarasua, Saeid Homayouni, Benyamin Hosseiny, Alireza Shams\",\"doi\":\"10.1111/1745-5871.12604\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Mobile terrestrial laser scanning (MTLS) systems provide a safe and efficient means to survey roadway corridors at high speed. MTLS point clouds are rich in planimetric data. However, manual extraction of useful information from these point clouds can be time consuming and laborious and automated object extraction from MTLS point clouds has become a hot topic in the remote sensing community. This study proposes an automated method for power line extraction from MTLS point clouds based on a multilayer perceptron (MLP) neural network. The proposed method consists of three main steps: (i) point cloud preprocessing, (ii) descriptor extraction and selection, and (iii) point classification. The preprocessing step involves filtering out more than 90% of the point cloud by eliminating the vast majority of unneeded points. Next, various descriptors are extracted from the remaining points including planarity, linearity, and verticality, and the descriptor standard deviation is used to select the best-suited descriptors for power line extraction. Finally, an MLP neural network is trained using the selected descriptors from several cable and noncable sample points. The proposed algorithm was evaluated in three MTLS point clouds in urban and nonurban environments totalling 5.5 kilometres in length. An average precision of 94% and a recall of 94% showed the algorithm’s reliability and feasibility.</p>\",\"PeriodicalId\":47233,\"journal\":{\"name\":\"Geographical Research\",\"volume\":\"61 4\",\"pages\":\"480-502\"},\"PeriodicalIF\":2.7000,\"publicationDate\":\"2023-05-29\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Geographical Research\",\"FirstCategoryId\":\"90\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1111/1745-5871.12604\",\"RegionNum\":2,\"RegionCategory\":\"社会学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"GEOGRAPHY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Geographical Research","FirstCategoryId":"90","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1111/1745-5871.12604","RegionNum":2,"RegionCategory":"社会学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"GEOGRAPHY","Score":null,"Total":0}
An enhanced descriptor extraction algorithm for power line detection from point clouds
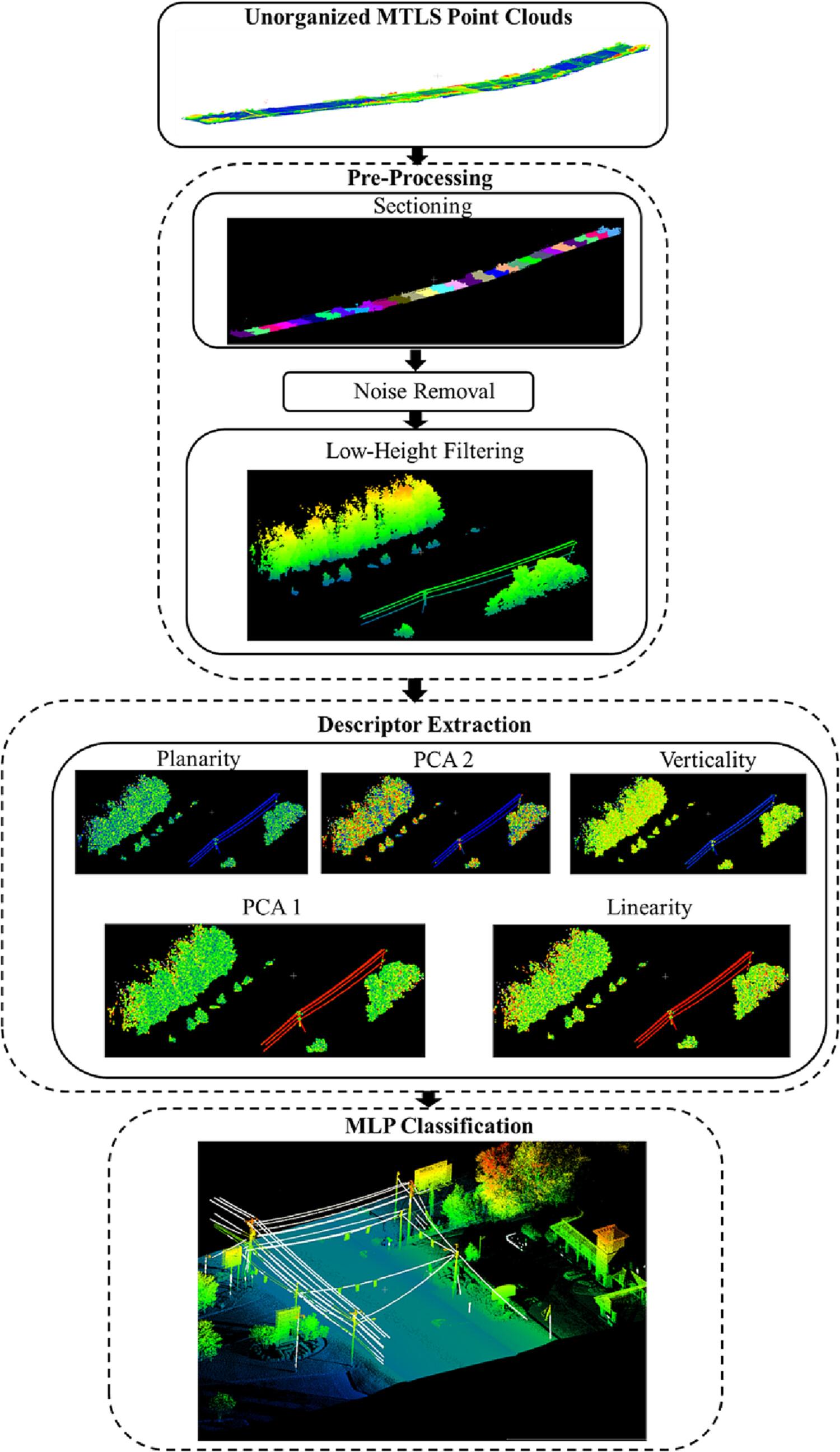
Mobile terrestrial laser scanning (MTLS) systems provide a safe and efficient means to survey roadway corridors at high speed. MTLS point clouds are rich in planimetric data. However, manual extraction of useful information from these point clouds can be time consuming and laborious and automated object extraction from MTLS point clouds has become a hot topic in the remote sensing community. This study proposes an automated method for power line extraction from MTLS point clouds based on a multilayer perceptron (MLP) neural network. The proposed method consists of three main steps: (i) point cloud preprocessing, (ii) descriptor extraction and selection, and (iii) point classification. The preprocessing step involves filtering out more than 90% of the point cloud by eliminating the vast majority of unneeded points. Next, various descriptors are extracted from the remaining points including planarity, linearity, and verticality, and the descriptor standard deviation is used to select the best-suited descriptors for power line extraction. Finally, an MLP neural network is trained using the selected descriptors from several cable and noncable sample points. The proposed algorithm was evaluated in three MTLS point clouds in urban and nonurban environments totalling 5.5 kilometres in length. An average precision of 94% and a recall of 94% showed the algorithm’s reliability and feasibility.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


