{"title":"自我和社交机器人之间物理距离的估计:我离机器人的距离和它离我的距离一样远吗?","authors":"Jean-Baptiste Lanfranchi, Sophie Lemonnier","doi":"10.5964/ejop.9519","DOIUrl":null,"url":null,"abstract":"<p><p>Research on the perception of interpersonal distance has shown the existence of an asymmetry effect which depends on the reference point of the estimation: the distance from oneself to others can be perceived as longer or shorter than the distance from others to oneself. The mechanism underlying this asymmetric effect is related to the object's cognitive salience. The self often functions as a habitual reference point and therefore one's own salience may be higher than that of other objects. In this case, an egocentric asymmetry effect appears with a perceived shorter distance from others to oneself. However, if others are more salient than oneself, then the reverse can happen (allocentric asymmetry effect). The present work investigates if asymmetry in self-other(s) distance perception changes when the other is a social robot. An experiment was conducted with 174 participants who were asked to estimate the distance between themselves and both robotic and human assistants on a schematic map of a hospital emergency room (between-subjects design). With robust ANOVA, the results showed that the participants felt closer to the human assistant than to the robot, notably when the person served as the estimation reference point. Perceived distances to the social robot were not significantly distorted. If a rather allocentric effect with the human assistant might reflect an affiliation goal on the part of the participants, the absence of effect with the social robot forces us to reconsider its humanization. This could nevertheless reflect a purely mechanical and utilitarian conception of it.</p>","PeriodicalId":47113,"journal":{"name":"Europes Journal of Psychology","volume":"19 3","pages":"299-307"},"PeriodicalIF":2.1000,"publicationDate":"2023-08-31","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10508198/pdf/","citationCount":"0","resultStr":"{\"title\":\"The Estimation of Physical Distances Between Oneself and a Social Robot: Am I as Far From the Robot as It is from Me?\",\"authors\":\"Jean-Baptiste Lanfranchi, Sophie Lemonnier\",\"doi\":\"10.5964/ejop.9519\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Research on the perception of interpersonal distance has shown the existence of an asymmetry effect which depends on the reference point of the estimation: the distance from oneself to others can be perceived as longer or shorter than the distance from others to oneself. The mechanism underlying this asymmetric effect is related to the object's cognitive salience. The self often functions as a habitual reference point and therefore one's own salience may be higher than that of other objects. In this case, an egocentric asymmetry effect appears with a perceived shorter distance from others to oneself. However, if others are more salient than oneself, then the reverse can happen (allocentric asymmetry effect). The present work investigates if asymmetry in self-other(s) distance perception changes when the other is a social robot. An experiment was conducted with 174 participants who were asked to estimate the distance between themselves and both robotic and human assistants on a schematic map of a hospital emergency room (between-subjects design). With robust ANOVA, the results showed that the participants felt closer to the human assistant than to the robot, notably when the person served as the estimation reference point. Perceived distances to the social robot were not significantly distorted. If a rather allocentric effect with the human assistant might reflect an affiliation goal on the part of the participants, the absence of effect with the social robot forces us to reconsider its humanization. This could nevertheless reflect a purely mechanical and utilitarian conception of it.</p>\",\"PeriodicalId\":47113,\"journal\":{\"name\":\"Europes Journal of Psychology\",\"volume\":\"19 3\",\"pages\":\"299-307\"},\"PeriodicalIF\":2.1000,\"publicationDate\":\"2023-08-31\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10508198/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Europes Journal of Psychology\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.5964/ejop.9519\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2023/8/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q2\",\"JCRName\":\"PSYCHOLOGY, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Europes Journal of Psychology","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.5964/ejop.9519","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/8/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"PSYCHOLOGY, MULTIDISCIPLINARY","Score":null,"Total":0}
The Estimation of Physical Distances Between Oneself and a Social Robot: Am I as Far From the Robot as It is from Me?
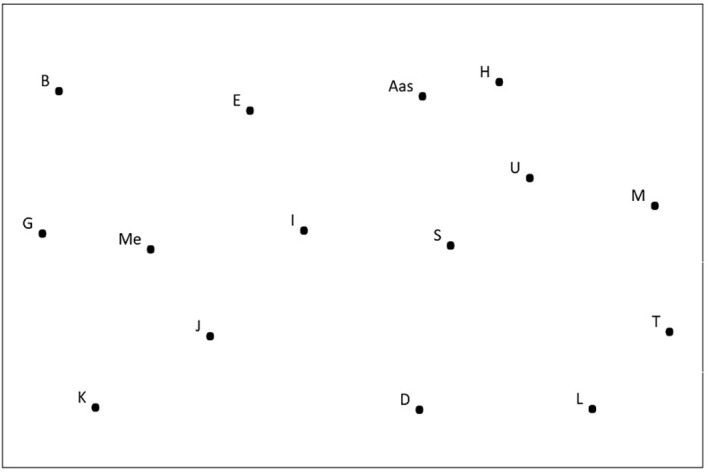
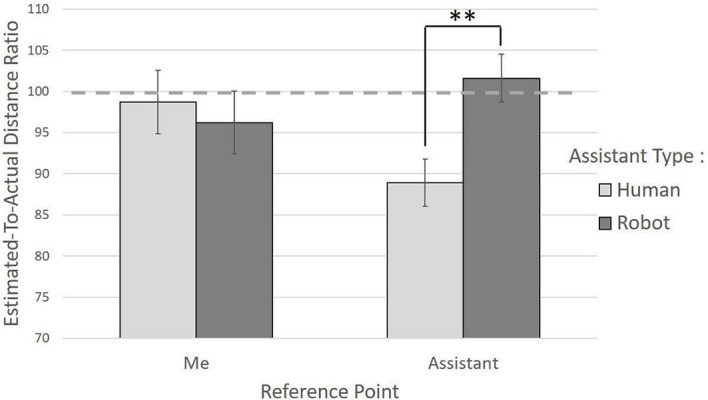
Research on the perception of interpersonal distance has shown the existence of an asymmetry effect which depends on the reference point of the estimation: the distance from oneself to others can be perceived as longer or shorter than the distance from others to oneself. The mechanism underlying this asymmetric effect is related to the object's cognitive salience. The self often functions as a habitual reference point and therefore one's own salience may be higher than that of other objects. In this case, an egocentric asymmetry effect appears with a perceived shorter distance from others to oneself. However, if others are more salient than oneself, then the reverse can happen (allocentric asymmetry effect). The present work investigates if asymmetry in self-other(s) distance perception changes when the other is a social robot. An experiment was conducted with 174 participants who were asked to estimate the distance between themselves and both robotic and human assistants on a schematic map of a hospital emergency room (between-subjects design). With robust ANOVA, the results showed that the participants felt closer to the human assistant than to the robot, notably when the person served as the estimation reference point. Perceived distances to the social robot were not significantly distorted. If a rather allocentric effect with the human assistant might reflect an affiliation goal on the part of the participants, the absence of effect with the social robot forces us to reconsider its humanization. This could nevertheless reflect a purely mechanical and utilitarian conception of it.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


