介质电流波导增强基于电阻抗的变形传感
IF 5.3
2区 材料科学
Q2 MATERIALS SCIENCE, MULTIDISCIPLINARY
引用次数: 0
摘要
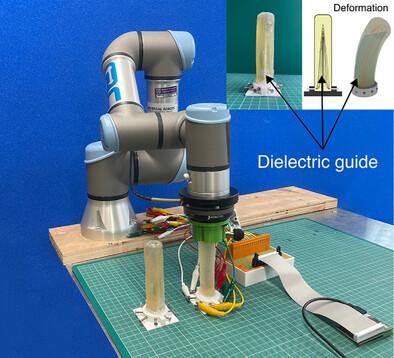
软机器人的变形感知对于其有效控制和与环境的交互至关重要。电阻抗断层扫描(EIT)通过监测电导率的变化来实现这种传感,但其灵敏度通常在电极附近最高,限制了远距离变形的性能。解决这一限制的现有策略通常依赖于引入导电材料的非均质性,例如各向异性或图案导体,以重定向电流。在这项工作中,提出了一种根本不同的方法:利用介电波导来操纵导电体内的电场。这种方法利用了广泛使用的柔性机器人材料,如硅,作为被动电场波导的新角色,允许在不嵌入导电元件的情况下重新配置灵敏度分布。用导电水凝胶圆柱体进行的物理实验表明,介质波导使变形传感精度提高了21%,降低了对噪声的灵敏度,并减少了所需的EIT通道数量。这项工作建立了基于电介质的场操纵作为一种新的设计策略,以实现高保真,低干扰的软体机器人本体感觉。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Enhancing Electrical Impedance Based Deformation Sensing with Dielectric Current Guide
Sensing the deformation of soft robots is vital for effective control and interaction with the environment. Electrical impedance tomography (EIT) enables such sensing by monitoring changes in conductivity, but its sensitivity is often highest near the electrodes, limiting performance for distant deformations. Existing strategies to address this limitation typically rely on introducing conductive material heterogeneities, such as anisotropic or patterned conductors, to redirect current flow. In this work, a fundamentally different approach is presented: utilizing a dielectric guide to manipulate the electric field within the conductive body. This method leverages widely used soft robotic materials, such as silicone, in a new role as a passive electric field guide, allowing reconfiguration of sensitivity distributions without embedding conductive components. Physical experiments with a conductive hydrogel cylinder show that the dielectric guide increases deformation sensing accuracy by 21%, reduces sensitivity to noise, and enables a reduction in the number of required EIT channels. This work establishes dielectric-based field manipulation as a novel design strategy for high-fidelity, low-interference proprioception in soft robotics.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊
Advanced Electronic Materials
NANOSCIENCE & NANOTECHNOLOGYMATERIALS SCIE-MATERIALS SCIENCE, MULTIDISCIPLINARY
CiteScore
11.00
自引率
3.20%
发文量
433
期刊介绍:
Advanced Electronic Materials is an interdisciplinary forum for peer-reviewed, high-quality, high-impact research in the fields of materials science, physics, and engineering of electronic and magnetic materials. It includes research on physics and physical properties of electronic and magnetic materials, spintronics, electronics, device physics and engineering, micro- and nano-electromechanical systems, and organic electronics, in addition to fundamental research.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


