RFDANet:一种基于多层关注的CNN和LSTM网络的FMCW和TOF雷达融合的驾驶员活动识别方法
IF 5
2区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
摘要
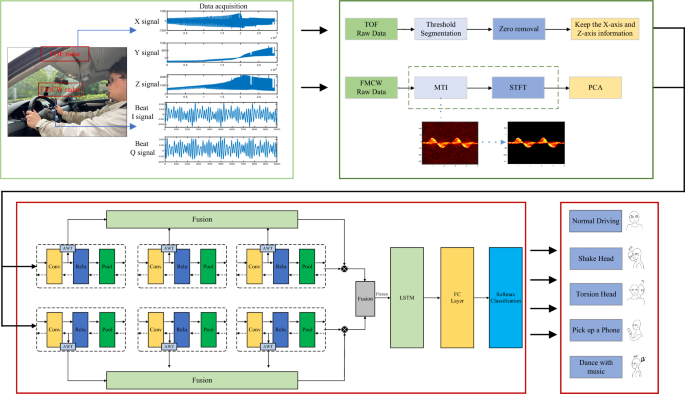
危险驾驶行为是造成道路交通事故的主要因素之一。因此,识别和干预驾驶员的不安全驾驶行为对于预防事故和确保道路安全至关重要。然而,许多现有的监控司机行为的方法依赖于计算机视觉技术,这有可能侵犯隐私。本文提出了一种基于雷达的深度学习方法来分析驾驶员行为。该方法利用FMCW雷达和TOF雷达来识别五种驾驶行为:正常驾驶、抬头、扭头、拿起手机和跟着音乐跳舞。所提出的模型称为RFDANet,它包括两个相互相对独立的并行前向传播通道。利用FMCW雷达的距离-多普勒信息和TOF雷达的位置信息作为输入。在CNN提取特征后,在分支层的深层架构中引入注意机制,调整不同分支的权重。为了进一步识别驾驶行为,使用LSTM。实际驾驶数据验证了该方法的有效性。结果表明,五种驾驶行为的平均准确率为94.5%,显示了使用所提出的深度学习方法的优势。总体而言,实验结果证实了该方法对驾驶员行为的检测是非常有效的。本文章由计算机程序翻译,如有差异,请以英文原文为准。
RFDANet: an FMCW and TOF radar fusion approach for driver activity recognition using multi-level attention based CNN and LSTM network
Abstract Dangerous driving behavior is a major contributing factor to road traffic accidents. Identifying and intervening in drivers’ unsafe driving behaviors is thus crucial for preventing accidents and ensuring road safety. However, many of the existing methods for monitoring drivers’ behaviors rely on computer vision technology, which has the potential to invade privacy. This paper proposes a radar-based deep learning method to analyze driver behavior. The method utilizes FMCW radar along with TOF radar to identify five types of driving behavior: normal driving, head up, head twisting, picking up the phone, and dancing to music. The proposed model, called RFDANet, includes two parallel forward propagation channels that are relatively independent of each other. The range-Doppler information from the FMCW radar and the position information from the TOF radar are used as inputs. After feature extraction by CNN, an attention mechanism is introduced into the deep architecture of the branch layer to adjust the weight of different branches. To further recognize driving behavior, LSTM is used. The effectiveness of the proposed method is verified by actual driving data. The results indicate that the average accuracy of each of the five types of driving behavior is 94.5%, which shows the advantage of using the proposed deep learning method. Overall, the experimental results confirm that the proposed method is highly effective for detecting drivers’ behavior.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Complex & Intelligent Systems
COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE-
CiteScore
9.60
自引率
10.30%
发文量
297
期刊介绍:
Complex & Intelligent Systems aims to provide a forum for presenting and discussing novel approaches, tools and techniques meant for attaining a cross-fertilization between the broad fields of complex systems, computational simulation, and intelligent analytics and visualization. The transdisciplinary research that the journal focuses on will expand the boundaries of our understanding by investigating the principles and processes that underlie many of the most profound problems facing society today.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


