Benny Wijaya, Kun Jiang, Mengmeng Yang, Tuopu Wen, Xuewei Tang, Diange Yang
{"title":"Crowdsourced Road Semantics Mapping Based on Pixel-Wise Confidence Level","authors":"Benny Wijaya, Kun Jiang, Mengmeng Yang, Tuopu Wen, Xuewei Tang, Diange Yang","doi":"10.1007/s42154-021-00173-x","DOIUrl":null,"url":null,"abstract":"<div><p>High-definition map has become a vital cornerstone in the navigation of autonomous vehicles in complex traffic scenarios. Thus, the construction of high-definition maps has become crucial. Traditional methods relying on expensive mapping vehicles equipped with high-end sensor equipment are not suitable for mass map construction because of the limitation imposed by its high cost. Hence, this paper proposes a new method to create a high-definition road semantics map using multi-vehicle sensor data. The proposed method implements crowdsourced point-based visual SLAM to align and combine the local maps derived by multiple vehicles. This allows users to modify the extraction process by using a more sophisticated neural network, thus achieving a more accurate detection result when compared with traditional binarization method. The resulting map consists of road marking points suitable for autonomous vehicle navigation and path-planning tasks. Finally, the method is evaluated on the real-world KAIST urban dataset and Shougang dataset to demonstrate the level of detail and accuracy of the proposed map with 0.369 m in mapping errors in ideal condition.</p></div>","PeriodicalId":36310,"journal":{"name":"Automotive Innovation","volume":"5 1","pages":"43 - 56"},"PeriodicalIF":5.0000,"publicationDate":"2022-01-29","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"1","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Automotive Innovation","FirstCategoryId":"1087","ListUrlMain":"https://link.springer.com/article/10.1007/s42154-021-00173-x","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 1
Abstract
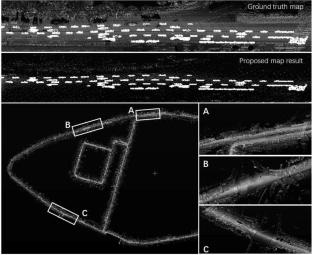
High-definition map has become a vital cornerstone in the navigation of autonomous vehicles in complex traffic scenarios. Thus, the construction of high-definition maps has become crucial. Traditional methods relying on expensive mapping vehicles equipped with high-end sensor equipment are not suitable for mass map construction because of the limitation imposed by its high cost. Hence, this paper proposes a new method to create a high-definition road semantics map using multi-vehicle sensor data. The proposed method implements crowdsourced point-based visual SLAM to align and combine the local maps derived by multiple vehicles. This allows users to modify the extraction process by using a more sophisticated neural network, thus achieving a more accurate detection result when compared with traditional binarization method. The resulting map consists of road marking points suitable for autonomous vehicle navigation and path-planning tasks. Finally, the method is evaluated on the real-world KAIST urban dataset and Shougang dataset to demonstrate the level of detail and accuracy of the proposed map with 0.369 m in mapping errors in ideal condition.
期刊介绍:
Automotive Innovation is dedicated to the publication of innovative findings in the automotive field as well as other related disciplines, covering the principles, methodologies, theoretical studies, experimental studies, product engineering and engineering application. The main topics include but are not limited to: energy-saving, electrification, intelligent and connected, new energy vehicle, safety and lightweight technologies. The journal presents the latest trend and advances of automotive technology.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


