Shanfei Zhang, Qi Wang, Zhuofan Li, Yizhuo Xu and Bin Su
{"title":"An esophagus-inspired magnetic-driven soft robot for directional transport of objects†","authors":"Shanfei Zhang, Qi Wang, Zhuofan Li, Yizhuo Xu and Bin Su","doi":"10.1039/D4TC03075C","DOIUrl":null,"url":null,"abstract":"<p >Magnetic-controlled soft robots, owing to their advantages such as non-contact manipulation, flexible control, and rapid deformability, have experienced rapid development and widespread application. However, most of the existing magnetically driven soft robots are solid or two-dimensional planar structures, which can only achieve shape deformation such as bending, twisting, and stretching. So far as we know, hollow magnetically driven soft robots that can transport objects inside themselves continuously have rarely been reported. Inspired by the swallowing of the biological esophagus, this study introduces a magnetic esophagus-inspired soft robot (MESR) featuring a hollow corrugated tube structure that can transport objects in an on-demand way. The MESR incorporates a unique N–S magnetic pole distribution, endowing it with excellent self-contraction and deformation capabilities under the influence of a magnetic field. The distinctive hollow corrugated tube structure and magnetic-controlled contraction abilities enable the MESR to achieve object transport in both horizontal and vertical anti-gravity directions under external magnetic fields, with transportation speeds of 6.4 mm s<small><sup>−1</sup></small> and 5.2 mm s<small><sup>−1</sup></small>, respectively. Abaqus numerical simulations further elucidated the magnetic-driven deformation mechanism of the MESR. Optimization of material properties and structural parameters was conducted to enhance MESR's object transport capabilities. Lastly, combining MESR's horizontal transport and vertical anti-gravity transport abilities, this study designed an on-demand object transport mechanism. The research provides an effective approach for achieving contraction deformation and material transport in magnetic-controlled soft robots, thereby expanding the functionality and application domains of such robotic systems.</p>","PeriodicalId":84,"journal":{"name":"Journal of Materials Chemistry C","volume":" 1","pages":" 250-259"},"PeriodicalIF":5.1000,"publicationDate":"2024-11-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Materials Chemistry C","FirstCategoryId":"1","ListUrlMain":"https://pubs.rsc.org/en/content/articlelanding/2025/tc/d4tc03075c","RegionNum":2,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
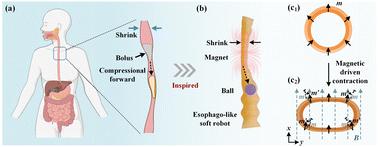
Magnetic-controlled soft robots, owing to their advantages such as non-contact manipulation, flexible control, and rapid deformability, have experienced rapid development and widespread application. However, most of the existing magnetically driven soft robots are solid or two-dimensional planar structures, which can only achieve shape deformation such as bending, twisting, and stretching. So far as we know, hollow magnetically driven soft robots that can transport objects inside themselves continuously have rarely been reported. Inspired by the swallowing of the biological esophagus, this study introduces a magnetic esophagus-inspired soft robot (MESR) featuring a hollow corrugated tube structure that can transport objects in an on-demand way. The MESR incorporates a unique N–S magnetic pole distribution, endowing it with excellent self-contraction and deformation capabilities under the influence of a magnetic field. The distinctive hollow corrugated tube structure and magnetic-controlled contraction abilities enable the MESR to achieve object transport in both horizontal and vertical anti-gravity directions under external magnetic fields, with transportation speeds of 6.4 mm s−1 and 5.2 mm s−1, respectively. Abaqus numerical simulations further elucidated the magnetic-driven deformation mechanism of the MESR. Optimization of material properties and structural parameters was conducted to enhance MESR's object transport capabilities. Lastly, combining MESR's horizontal transport and vertical anti-gravity transport abilities, this study designed an on-demand object transport mechanism. The research provides an effective approach for achieving contraction deformation and material transport in magnetic-controlled soft robots, thereby expanding the functionality and application domains of such robotic systems.
磁控软机器人由于其非接触操作、控制灵活、可快速变形等优点,得到了迅速发展和广泛应用。然而,现有的磁驱动软机器人大多是固体或二维平面结构,只能实现弯曲、扭曲、拉伸等形状变形。据我们所知,能在内部连续运输物体的空心磁驱动软机器人鲜有报道。受生物食道吞咽的启发,本研究介绍了一种磁食道启发软机器人(MESR),其特点是具有中空波纹管结构,可以按需运输物体。MESR采用独特的N-S磁极分布,使其在磁场影响下具有优异的自收缩和变形能力。独特的空心波纹管结构和磁控收缩能力使MESR能够在外加磁场下实现水平和垂直反重力方向的物体传输,传输速度分别为6.4 mm s−1和5.2 mm s−1。Abaqus数值模拟进一步阐明了MESR的磁驱动变形机制。对材料性能和结构参数进行了优化,提高了MESR的物体传输能力。最后,结合MESR的水平和垂直反重力传输能力,设计了按需物体传输机制。该研究为实现磁控软机器人的收缩变形和材料传输提供了有效途径,从而拓展了此类机器人系统的功能和应用领域。
期刊介绍:
The Journal of Materials Chemistry is divided into three distinct sections, A, B, and C, each catering to specific applications of the materials under study:
Journal of Materials Chemistry A focuses primarily on materials intended for applications in energy and sustainability.
Journal of Materials Chemistry B specializes in materials designed for applications in biology and medicine.
Journal of Materials Chemistry C is dedicated to materials suitable for applications in optical, magnetic, and electronic devices.
Example topic areas within the scope of Journal of Materials Chemistry C are listed below. This list is neither exhaustive nor exclusive.
Bioelectronics
Conductors
Detectors
Dielectrics
Displays
Ferroelectrics
Lasers
LEDs
Lighting
Liquid crystals
Memory
Metamaterials
Multiferroics
Photonics
Photovoltaics
Semiconductors
Sensors
Single molecule conductors
Spintronics
Superconductors
Thermoelectrics
Topological insulators
Transistors
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


