A collaborative docking strategy for medium-to-large segments based on the combined field-of-view measurement system
IF 5.2
2区 工程技术
Q1 ENGINEERING, MULTIDISCIPLINARY
引用次数: 0
Abstract
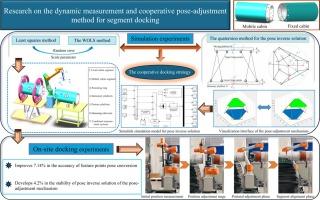
With the rapid development of the aerospace industry, achieving high-precision and high-efficiency assembly and docking of spacecraft segments (such as missiles, airplanes, and rockets) has become an urgent challenge to overcome. Given the assembly demand of the segment pose-adjustment and docking, a pose-adjustment measurement network of the cabin segment was constructed under a large field of view in this study. Then a cooperative docking strategy was proposed for docking and assembly of large segment-type components by taking the major difficulties in large component pose-adjustment and docking technology as an entry point. Considering the limitations of the traditional least squares-based pose conversion method, a combined measurement pose conversion method was proposed based on the weighted overall least squares (WOLS) method, and the error threshold iteration is used to improve the conversion accuracy, so that the overall pose conversion accuracy of the feature points is about 0.028 mm. Additionally, regarding the pose adjustment of cabin segments, this study refines the inverse solution pose model and proposes a pose inverse solution method for the parallel robot using the quaternion approach, which results in an accuracy of about 0.036 mm in the pose movement. Meanwhile, considering the influence of complex factors on docking accuracy, we propose a comprehensive assessment model of attitude adjustment accuracy based on the extreme value method, and calculate that the docking accuracy of cabin segment pose adjustment under this strategy is about 0.0814 mm. Finally, this study presents accuracy simulations and on-site docking experiments. The experimental results indicate that the cooperative docking strategy improves the accuracy of feature point pose conversion by 7.14 % and the stability of the pose inverse solution of the pose-adjustment mechanism by 4.2 %. This meets the accuracy requirements, enhances docking efficiency, and demonstrates feasibility in engineering practice.
求助全文
约1分钟内获得全文
求助全文
来源期刊

Measurement
工程技术-工程:综合
CiteScore
10.20
自引率
12.50%
发文量
1589
审稿时长
12.1 months
期刊介绍:
Contributions are invited on novel achievements in all fields of measurement and instrumentation science and technology. Authors are encouraged to submit novel material, whose ultimate goal is an advancement in the state of the art of: measurement and metrology fundamentals, sensors, measurement instruments, measurement and estimation techniques, measurement data processing and fusion algorithms, evaluation procedures and methodologies for plants and industrial processes, performance analysis of systems, processes and algorithms, mathematical models for measurement-oriented purposes, distributed measurement systems in a connected world.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


