Comprehensive street built environmental recognizabililty evaluation by integrating visual and spatial structural data
IF 5
2区 社会学
Q1 URBAN STUDIES
引用次数: 0
Abstract
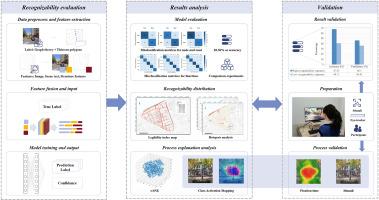
Evaluating the recognizability of street built environments provides crucial support for urban planning, security monitoring and navigation. Although street view images (SVIs) are widely used in urban studies, it overlooks the interconnection among different locations, which can also affect perceptions about environmental recognizability. To address this issue, this study proposes a deep learning-based model called RB-Node, which comprehensively integrates spatial structural features in a road network view and visual features from SVIs, achieving 82.56% accuracy. It appears that image information from visual features dominates environmental recognizability. Additionally, structural information contributes significantly to the accurate classification of nodes and waterfront promenade areas. Moreover, scene-text information, a subset of visual features, helps classify commercial and historical areas. Furthermore, 1056 samples were collected through an eye-tracking experiment to validate the recognizability evaluation results, as well as compare the decision-making process between humans and RB-Node. According to the results, RB-Node behaviour and human observed behavior follow similar patterns, although human perceptions tend to be more holistic than RB-Node's. This study contributes to a better understanding of environmental recognizability and provides targeted recommendations for urban renewal.
通过整合视觉和空间结构数据进行街道建筑环境综合识别评估
评估街道建筑环境的可识别性为城市规划、安全监控和导航提供了重要支持。虽然街景图像(SVI)被广泛应用于城市研究,但它忽略了不同地点之间的相互联系,这也会影响人们对环境可识别性的感知。针对这一问题,本研究提出了一种基于深度学习的模型--RB-Node,该模型综合了路网视图中的空间结构特征和 SVI 中的视觉特征,准确率达到 82.56%。由此看来,来自视觉特征的图像信息主导了环境可识别性。此外,结构信息对节点和海滨长廊区域的准确分类也有很大帮助。此外,作为视觉特征子集的场景文本信息也有助于对商业和历史区域进行分类。此外,还通过眼动跟踪实验收集了 1056 个样本,以验证可识别性评估结果,并比较人类和 RB-Node 的决策过程。结果显示,RB-Node 的行为和人类观察到的行为遵循相似的模式,但人类的感知往往比 RB-Node 更全面。这项研究有助于更好地理解环境可识别性,并为城市更新提供有针对性的建议。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
Journal of Urban Management
URBAN STUDIES-
CiteScore
9.50
自引率
4.90%
发文量
45
审稿时长
65 days
期刊介绍:
Journal of Urban Management (JUM) is the Official Journal of Zhejiang University and the Chinese Association of Urban Management, an international, peer-reviewed open access journal covering planning, administering, regulating, and governing urban complexity.
JUM has its two-fold aims set to integrate the studies across fields in urban planning and management, as well as to provide a more holistic perspective on problem solving.
1) Explore innovative management skills for taming thorny problems that arise with global urbanization
2) Provide a platform to deal with urban affairs whose solutions must be looked at from an interdisciplinary perspective.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


