EMG and SSVEP-based bimodal estimation of elbow angle trajectory
IF 2.9
3区 医学
Q2 NEUROSCIENCES
引用次数: 0
Abstract
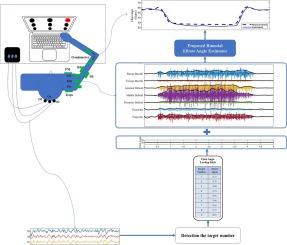
Detecting intentions and estimating movement trajectories in a human–machine interface (HMI) using electromyogram (EMG) signals is particularly challenging, especially for individuals with movement impairments. Therefore, incorporating additional information from other biological sources, potential discrete information in the movement, and the EMG signal can be practical. This study combined EMG and target information to enhance estimation performance during reaching movements. EMG activity of the shoulder and arm muscles, elbow angle, and the electroencephalogram signals of ten healthy subjects were recorded while they reached blinking targets. The reaching target was recognized by steady-state visual evoked potential (SSVEP). The selected target’s final angle and EMG were then mapped to the elbow angle trajectory. The proposed bimodal structure, which integrates EMG and final elbow angle information, outperformed the EMG-based decoder. Even under conditions of higher fatigue, the proposed structure provided better performance than the EMG decoder. Including additional information about the recognized reaching target in the trajectory model improved the estimation of the reaching profile. Consequently, this study’s findings suggest that bimodal decoders are highly beneficial for enhancing assistive robotic devices and prostheses, especially for real-time upper limb rehabilitation.
基于 EMG 和 SSVEP 的肘部角度轨迹双模态估算。
使用肌电图(EMG)信号在人机界面(HMI)中检测意图和估计运动轨迹尤其具有挑战性,对于有运动障碍的人来说更是如此。因此,将来自其他生物源的附加信息、运动中潜在的离散信息和 EMG 信号结合起来是非常实用的。本研究结合了 EMG 和目标信息,以提高伸手动作中的估计性能。研究记录了十名健康受试者在到达闪烁目标时肩部和手臂肌肉的肌电图活动、肘关节角度以及脑电信号。伸手目标由稳态视觉诱发电位(SSVEP)识别。然后将所选目标的最终角度和肌电图映射到肘部角度轨迹上。所提出的双模态结构整合了肌电图和最终肘角信息,其性能优于基于肌电图的解码器。即使在疲劳度较高的情况下,所提出的结构也比肌电图解码器的性能更好。在轨迹模型中加入有关识别到的伸手目标的额外信息,可改善对伸手轮廓的估计。因此,本研究的结果表明,双模解码器非常有利于增强辅助机器人设备和假肢,尤其是用于实时上肢康复。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
Neuroscience
医学-神经科学
CiteScore
6.20
自引率
0.00%
发文量
394
审稿时长
52 days
期刊介绍:
Neuroscience publishes papers describing the results of original research on any aspect of the scientific study of the nervous system. Any paper, however short, will be considered for publication provided that it reports significant, new and carefully confirmed findings with full experimental details.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


