{"title":"Investigation of Knee Torque Dynamics in Single-Leg Transfemoral Prosthetic during Walking Using Mathematical Modeling","authors":"Peguy Kameni Nteutse, Abebe Geletu","doi":"10.1155/2024/8891686","DOIUrl":null,"url":null,"abstract":"<div>\n <p>Transfemoral amputees rely on prosthetic devices to restore their mobility and maintain their independence. However, the design and performance of these devices can significantly affect the amputee’s gait and overall functionality. In this study, we investigate the knee torque dynamics of a single-leg transfemoral prosthetic during walking using a mathematical model that takes into consideration knee friction force (<i>β</i><sub>2</sub>), the horizontal component of the ground reaction force (<i>F</i><sub>1</sub>), and the vertical component of the ground reaction force (<i>F</i><sub>2</sub>). By carrying out model simulation in the MATLAB tool, along with Simulink, we derived the tracking error between the generated knee torque of the transfemoral prosthesis and the knee torque trajectory for a normal human leg. This error was evaluated using the normalized root mean square error (NRMSE) method. Our results show that when <i>β</i><sub>2</sub> = 0.3 <i>N</i>.<i>s</i>.<i>m</i><sup>−1</sup>, <i>F</i><sub>1</sub> = 320 <i>N</i>, and <i>F</i><sub>2</sub> = 800 <i>N</i>, a tracking error of NRMSE = 0.342868% occurs. A comparison between the simulated knee torque and a desired knee torque trajectory for a normal leg study in the literature suggests that the tracking error generated will force the amputee to use higher metabolic energy to minimize discomfort while walking. These findings highlight the importance of optimizing the design and performance of transfemoral prosthetic devices to improve the knee torque dynamics and overall functionality of amputees. Our mathematical model provides a useful tool for future research in this field, which could help develop more effective prosthetic devices for transfemoral amputees.</p>\n </div>","PeriodicalId":50653,"journal":{"name":"Complexity","volume":"2024 1","pages":""},"PeriodicalIF":1.7000,"publicationDate":"2024-07-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1155/2024/8891686","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Complexity","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1155/2024/8891686","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MATHEMATICS, INTERDISCIPLINARY APPLICATIONS","Score":null,"Total":0}
引用次数: 0
Abstract
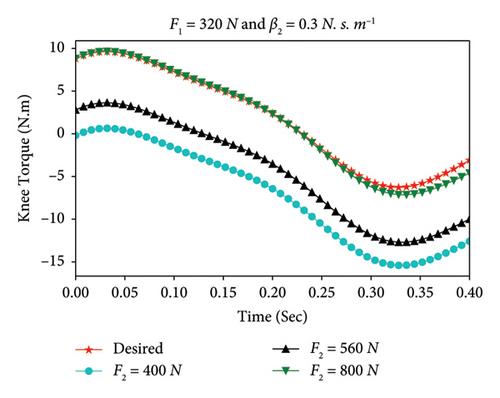
Transfemoral amputees rely on prosthetic devices to restore their mobility and maintain their independence. However, the design and performance of these devices can significantly affect the amputee’s gait and overall functionality. In this study, we investigate the knee torque dynamics of a single-leg transfemoral prosthetic during walking using a mathematical model that takes into consideration knee friction force (β2), the horizontal component of the ground reaction force (F1), and the vertical component of the ground reaction force (F2). By carrying out model simulation in the MATLAB tool, along with Simulink, we derived the tracking error between the generated knee torque of the transfemoral prosthesis and the knee torque trajectory for a normal human leg. This error was evaluated using the normalized root mean square error (NRMSE) method. Our results show that when β2 = 0.3 N.s.m−1, F1 = 320 N, and F2 = 800 N, a tracking error of NRMSE = 0.342868% occurs. A comparison between the simulated knee torque and a desired knee torque trajectory for a normal leg study in the literature suggests that the tracking error generated will force the amputee to use higher metabolic energy to minimize discomfort while walking. These findings highlight the importance of optimizing the design and performance of transfemoral prosthetic devices to improve the knee torque dynamics and overall functionality of amputees. Our mathematical model provides a useful tool for future research in this field, which could help develop more effective prosthetic devices for transfemoral amputees.
期刊介绍:
Complexity is a cross-disciplinary journal focusing on the rapidly expanding science of complex adaptive systems. The purpose of the journal is to advance the science of complexity. Articles may deal with such methodological themes as chaos, genetic algorithms, cellular automata, neural networks, and evolutionary game theory. Papers treating applications in any area of natural science or human endeavor are welcome, and especially encouraged are papers integrating conceptual themes and applications that cross traditional disciplinary boundaries. Complexity is not meant to serve as a forum for speculation and vague analogies between words like “chaos,” “self-organization,” and “emergence” that are often used in completely different ways in science and in daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


