{"title":"Toward automatic robotic massage based on interactive trajectory planning and control","authors":"Qinling Xu, Zhen Deng, Chao Zeng, Zhuoran Li, Bingwei He, Jianwei Zhang","doi":"10.1007/s40747-024-01384-5","DOIUrl":null,"url":null,"abstract":"<p>Autonomous robotic massage holds the potential to alleviate the workload of nurses and improve the quality of healthcare. However, the complexity of the task and the dynamic of the environment present significant challenges for robotic massage. This paper presents a vision-based robotic massage (VBRM) framework that facilitates autonomous robot massaging of the human body while ensuring safe operation in a dynamic environment. The VBRM framework allows the operator to define the massage trajectory by drawing a 2D curve on an RGB image. An interactive trajectory planning method is developed to calculate a 3D massage trajectory from the 2D trajectory. This method accounts for potential movements of the human body and updates the planned trajectory using rigid point cloud registration. Additionally, a hybrid motion/force controller is employed to regulate the motion of the robot’s end-effector, considering the possibility of excessive contact force. The proposed framework enables the operator to adjust the massage trajectory and speed according to their requirements. Real-world experiments are conducted to evaluate the efficacy of the proposed approach. The results demonstrate that the framework enables successful planning and execution of the massage task in a dynamic environment. Furthermore, the operator has the flexibility to set the massage trajectory, speed, and contact force arbitrarily, thereby enhancing human–machine interaction.</p>","PeriodicalId":10524,"journal":{"name":"Complex & Intelligent Systems","volume":"20 1","pages":""},"PeriodicalIF":4.6000,"publicationDate":"2024-03-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Complex & Intelligent Systems","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s40747-024-01384-5","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
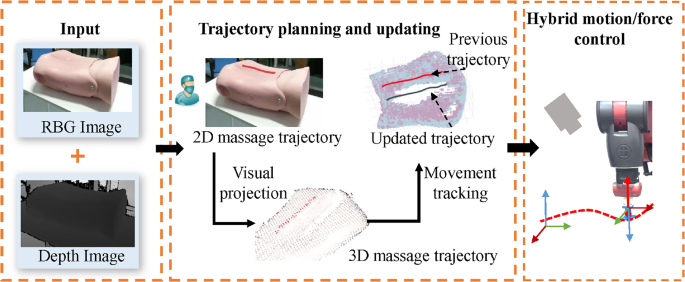
Autonomous robotic massage holds the potential to alleviate the workload of nurses and improve the quality of healthcare. However, the complexity of the task and the dynamic of the environment present significant challenges for robotic massage. This paper presents a vision-based robotic massage (VBRM) framework that facilitates autonomous robot massaging of the human body while ensuring safe operation in a dynamic environment. The VBRM framework allows the operator to define the massage trajectory by drawing a 2D curve on an RGB image. An interactive trajectory planning method is developed to calculate a 3D massage trajectory from the 2D trajectory. This method accounts for potential movements of the human body and updates the planned trajectory using rigid point cloud registration. Additionally, a hybrid motion/force controller is employed to regulate the motion of the robot’s end-effector, considering the possibility of excessive contact force. The proposed framework enables the operator to adjust the massage trajectory and speed according to their requirements. Real-world experiments are conducted to evaluate the efficacy of the proposed approach. The results demonstrate that the framework enables successful planning and execution of the massage task in a dynamic environment. Furthermore, the operator has the flexibility to set the massage trajectory, speed, and contact force arbitrarily, thereby enhancing human–machine interaction.
期刊介绍:
Complex & Intelligent Systems aims to provide a forum for presenting and discussing novel approaches, tools and techniques meant for attaining a cross-fertilization between the broad fields of complex systems, computational simulation, and intelligent analytics and visualization. The transdisciplinary research that the journal focuses on will expand the boundaries of our understanding by investigating the principles and processes that underlie many of the most profound problems facing society today.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


