弯道超车?国产具身,千小时人类数据激发智能涌现
果壳硬科技
2026-03-05 15:20
文章摘要
本文背景是当前具身智能领域普遍依赖机器人真机或仿真轨迹数据,但面临泛化能力不足的瓶颈。研究目的是探讨通过利用人类第一视角数据来让模型学习物理常识,从而提升机器人操作智能的新范式。文章以深度机智公司为例,介绍了其通过构建数据翻译管道(Egocentric2Embodiment)、设计双脑架构(TwinBrainVLA)和改进训练算法(LangForce)等技术,仅用千小时人类数据便在多个基准测试中取得领先。结论表明,优先让模型理解物理世界规律(“先理解,后执行”)比单纯拟合动作轨迹更高效,能实现更好的泛化、涌现能力和数据效率,这代表了具身智能发展的一个重要方向。

本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者速来电或来函联系。
果壳硬科技

从4小时到39秒:AI如何重塑气象预报|论文解读.
2026-03-06

独家对话极映科技高鑫:我们为什么要做一个比Sora难10倍的物理世界模型?.
2026-02-09
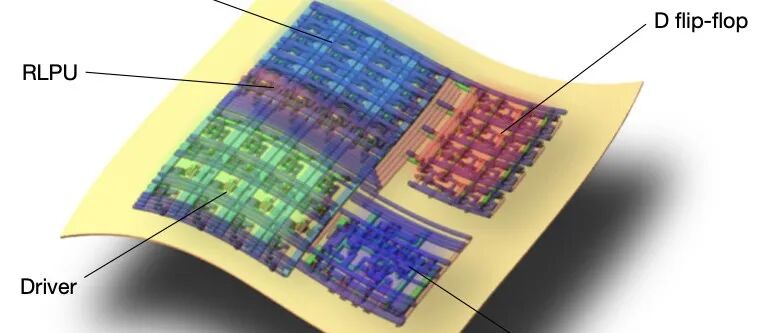
能屈能伸,清华任天令团队发布全球首款高性能柔性AI芯片|论文解读.
2026-02-03

当“机器人科学家”登上顶刊封面:AI驱动钙钛矿量子点研发新范式.
2026-01-30
最新文章

Joule:粘附功指导成核控制,深入理解钾金属电池枝晶问题!
2026-04-02

复旦/南大/东京大学合作,Nature!
2026-04-02

新加坡国立大学(NUS)鲁俊课题组诚聘博士后及博士生
2026-04-02

购买研理云服务器,让计算更省心!免费测试!
16小时前

