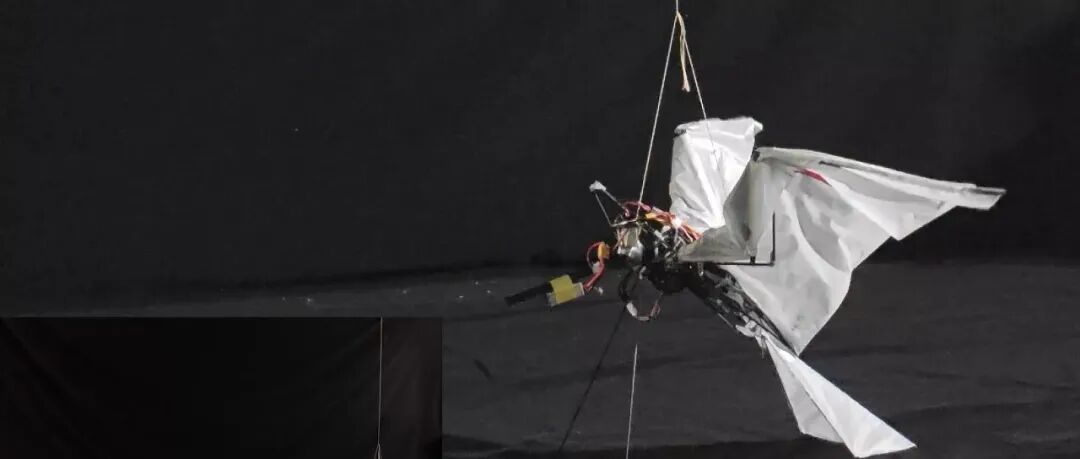
西北工业大学|扑翼机器人通过可重构机构的应用实现了仿鸟自主起飞
ScienceAAAS
2025-09-12 13:45
文章摘要
背景:鸟类与蝙蝠等飞行脊椎动物采用特殊的FSF扑动模式实现低速飞行,但该模式在仿生扑翼机器人领域应用较少。研究目的:研发搭载可重构扑动机构的小隼2.0扑翼机器人,模拟鸟类FSF扑动模式,实现仿鸟自主起飞。结论:通过机构设计、风洞实验和CFD模拟验证了扫掠幅度调节对气动特性的影响,成功实现姿态可控的自主起飞,为仿生飞行机器人设计提供新方法。
本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者速来电或来函联系。
推荐文献

Local reaction-global diffusion unlocks high-performance Mg<sub>3</sub>(Sb,Bi)<sub>2</sub>-based thermoelectrics.
DOI: 10.1016/j.scib.2025.11.037
Pub Date : 2026-03-15
Date: 2025/11/21 0:00:00

Southern Hemisphere initiation of the mid-Pleistocene transition.
DOI: 10.1126/sciadv.aea6811
Pub Date : 2026-03-06
Date: 2026/3/4 0:00:00

Physical Crowding in 3D Niche Regulates Neural Stem Cell Differentiation via Cx43-mediated Gap Junction Communication
DOI: 10.1016/j.isci.2026.115272
Pub Date : 2026-03-01
ScienceAAAS

SPJ|王振常院士团队:基于U-HRCT和三维几何信息解析实现听小骨自动测量与量化分析.
2025-12-26

陆军军医大学等联合团队|面向癫痫精准治疗的脑网络调控新范式:个体化靶点识别与干预.
2025-12-26

SPJ|OLAR海陆气研究:全球海洋资料同化与预报系统(YHGO).
2025-12-25

上海交大附属九院:HDAC5-ACTN4信号轴揭示慢性创面再上皮化的新治疗靶点.
2025-12-25

SPJ|ADI综述:当成像系统学会"学习":化物理不确定性为数字智能.
2025-12-23
最新文章


亲密关系心理学,原来“听不听劝“藏着印象小心机!
10小时前



