UCLA贺曦敏教授团队 Sci. Robot.: 提升自主软体机器人的物理智能 - 需化学、材料学、力学、数学、生物学...
高分子科技
2025-06-04 16:08
文章摘要
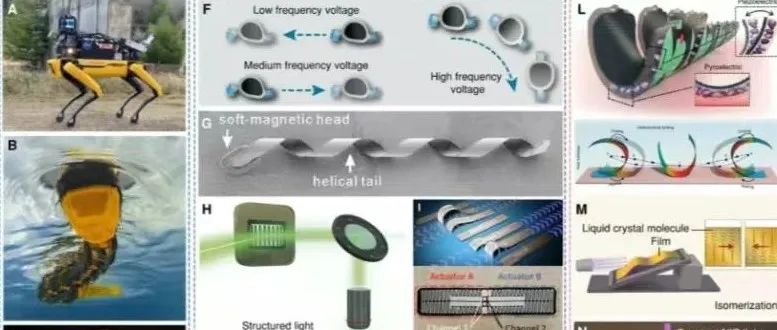
本文综述了加州大学洛杉矶分校贺曦敏教授团队在自主软体机器人领域的研究进展,重点探讨了如何通过嵌入非线性时滞反馈机制实现物理智能(API),使机器人具备自我调节感知、决策和驱动的能力。文章追溯了仿生机器人发展的两条路线:计算智能和物理智能,并详细分析了不同反馈系统对机器人行为的影响。通过比较负反馈、正反馈和非线性反馈系统的动力学轨迹,阐明了实现自持续运动的机制。此外,文章还总结了实现API的多种策略,包括外部刺激场、化学振荡反应、生物杂交系统和被动机械结构设计,并展望了未来在能量获取、群体行为和多模态运动等方面的研究方向。
本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者速来电或来函联系。
推荐文献

Issue Information
DOI: 10.1002/rob.70145
Pub Date : 2025-12-17

Fatigue Detection with Multimodal Physiological Signals via Uncertainty-Aware Deep Transfer Learning
DOI: 10.1007/s42235-025-00827-0
Pub Date : 2026-01-13

Visual-tactile pretraining and online multitask learning for humanlike manipulation dexterity
DOI: 10.1126/scirobotics.ady2869
Pub Date : 2026-01-28
高分子科技




Matter:热整流梯度多孔高分子复合材料助力户外自降温热伪装.
2026-02-07

最新文章

