Samuel Alves, Mihail Babcinschi, Afonso Silva, Diogo Neto, Diogo Fonseca, Pedro Neto
{"title":"生物启发多材料软机械手的集成设计制造与控制","authors":"Samuel Alves, Mihail Babcinschi, Afonso Silva, Diogo Neto, Diogo Fonseca, Pedro Neto","doi":"10.34133/cbsystems.0051","DOIUrl":null,"url":null,"abstract":"<p><p>Machines that mimic humans have inspired scientists for centuries. Bioinspired soft robotic hands are a good example of such an endeavor, featuring intrinsic material compliance and continuous motion to deal with uncertainty and adapt to unstructured environments. Recent research led to impactful achievements in functional designs, modeling, fabrication, and control of soft robots. Nevertheless, the full realization of life-like movements is still challenging to achieve, often based on trial-and-error considerations from design to fabrication, consuming time and resources. In this study, a soft robotic hand is proposed, composed of soft actuator cores and an exoskeleton, featuring a multimaterial design aided by finite element analysis (FEA) to define the hand geometry and promote finger's bendability. The actuators are fabricated using molding, and the exoskeleton is 3D-printed in a single step. An ON-OFF controller keeps the set fingers' inner pressures related to specific bending angles, even in the presence of leaks. The FEA numerical results were validated by experimental tests, as well as the ability of the hand to grasp objects with different shapes, weights, and sizes. This integrated solution will make soft robotic hands more available to people, at a reduced cost, avoiding the time-consuming design-fabrication trial-and-error processes.</p>","PeriodicalId":72764,"journal":{"name":"Cyborg and bionic systems (Washington, D.C.)","volume":"4 ","pages":"0051"},"PeriodicalIF":18.1000,"publicationDate":"2023-08-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10408382/pdf/","citationCount":"0","resultStr":"{\"title\":\"Integrated Design Fabrication and Control of a Bioinspired Multimaterial Soft Robotic Hand.\",\"authors\":\"Samuel Alves, Mihail Babcinschi, Afonso Silva, Diogo Neto, Diogo Fonseca, Pedro Neto\",\"doi\":\"10.34133/cbsystems.0051\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Machines that mimic humans have inspired scientists for centuries. Bioinspired soft robotic hands are a good example of such an endeavor, featuring intrinsic material compliance and continuous motion to deal with uncertainty and adapt to unstructured environments. Recent research led to impactful achievements in functional designs, modeling, fabrication, and control of soft robots. Nevertheless, the full realization of life-like movements is still challenging to achieve, often based on trial-and-error considerations from design to fabrication, consuming time and resources. In this study, a soft robotic hand is proposed, composed of soft actuator cores and an exoskeleton, featuring a multimaterial design aided by finite element analysis (FEA) to define the hand geometry and promote finger's bendability. The actuators are fabricated using molding, and the exoskeleton is 3D-printed in a single step. An ON-OFF controller keeps the set fingers' inner pressures related to specific bending angles, even in the presence of leaks. The FEA numerical results were validated by experimental tests, as well as the ability of the hand to grasp objects with different shapes, weights, and sizes. This integrated solution will make soft robotic hands more available to people, at a reduced cost, avoiding the time-consuming design-fabrication trial-and-error processes.</p>\",\"PeriodicalId\":72764,\"journal\":{\"name\":\"Cyborg and bionic systems (Washington, D.C.)\",\"volume\":\"4 \",\"pages\":\"0051\"},\"PeriodicalIF\":18.1000,\"publicationDate\":\"2023-08-08\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10408382/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Cyborg and bionic systems (Washington, D.C.)\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.34133/cbsystems.0051\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2023/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cyborg and bionic systems (Washington, D.C.)","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.34133/cbsystems.0051","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/1/1 0:00:00","PubModel":"eCollection","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
Integrated Design Fabrication and Control of a Bioinspired Multimaterial Soft Robotic Hand.
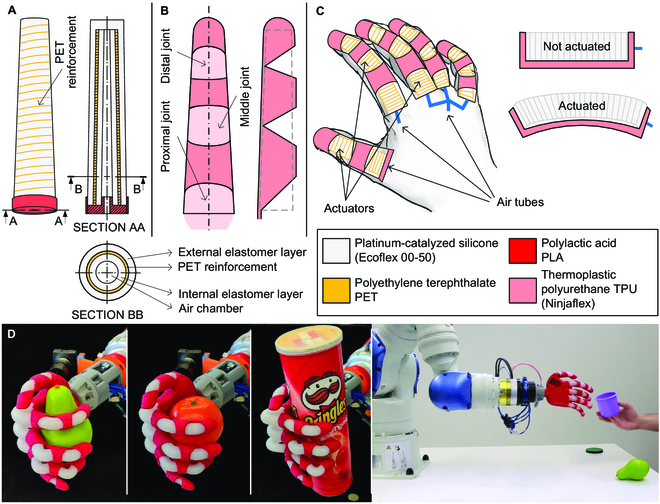
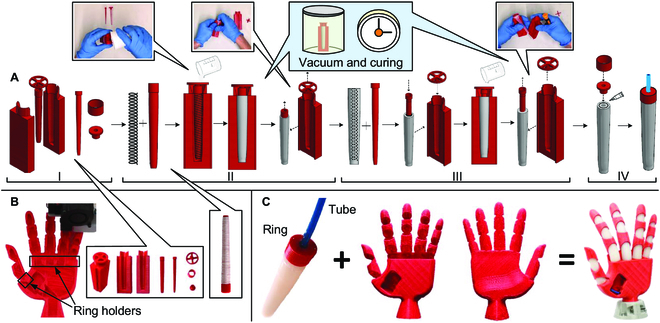
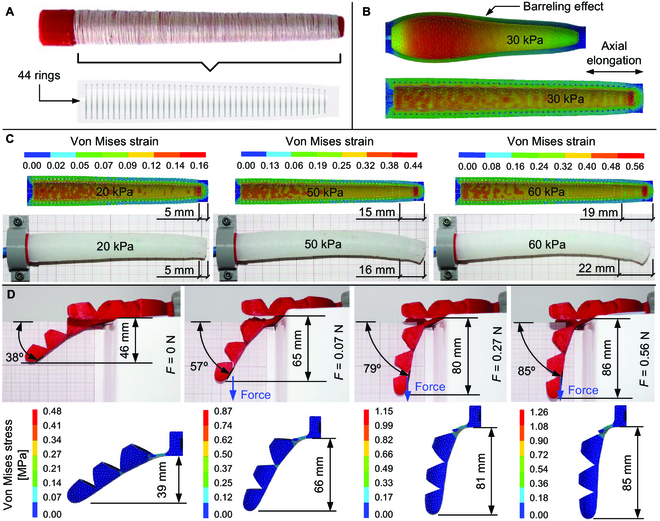
Machines that mimic humans have inspired scientists for centuries. Bioinspired soft robotic hands are a good example of such an endeavor, featuring intrinsic material compliance and continuous motion to deal with uncertainty and adapt to unstructured environments. Recent research led to impactful achievements in functional designs, modeling, fabrication, and control of soft robots. Nevertheless, the full realization of life-like movements is still challenging to achieve, often based on trial-and-error considerations from design to fabrication, consuming time and resources. In this study, a soft robotic hand is proposed, composed of soft actuator cores and an exoskeleton, featuring a multimaterial design aided by finite element analysis (FEA) to define the hand geometry and promote finger's bendability. The actuators are fabricated using molding, and the exoskeleton is 3D-printed in a single step. An ON-OFF controller keeps the set fingers' inner pressures related to specific bending angles, even in the presence of leaks. The FEA numerical results were validated by experimental tests, as well as the ability of the hand to grasp objects with different shapes, weights, and sizes. This integrated solution will make soft robotic hands more available to people, at a reduced cost, avoiding the time-consuming design-fabrication trial-and-error processes.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


