Sinuo Zhao, Chi Cong Nguyen, Trung Thien Hoang, Thanh Nho Do, Hoang-Phuong Phan
{"title":"用于软生物医学机器人的透明气动触觉传感器。","authors":"Sinuo Zhao, Chi Cong Nguyen, Trung Thien Hoang, Thanh Nho Do, Hoang-Phuong Phan","doi":"10.3390/s23125671","DOIUrl":null,"url":null,"abstract":"<p><p>Palpation is a simple but effective method to distinguish tumors from healthy tissues. The development of miniaturized tactile sensors embedded on endoscopic or robotic devices is key to achieving precise palpation diagnosis and subsequent timely treatment. This paper reports on the fabrication and characterization of a novel tactile sensor with mechanical flexibility and optical transparency that can be easily mounted on soft surgical endoscopes and robotics. By utilizing the pneumatic sensing mechanism, the sensor offers a high sensitivity of 1.25 mbar and negligible hysteresis, enabling the detection of phantom tissues with different stiffnesses ranging from 0 to 2.5 MPa. Our configuration, combining pneumatic sensing and hydraulic actuating, also eliminates electrical wiring from the functional elements located at the robot end-effector, thereby enhancing the system safety. The optical transparency path in the sensors together with its mechanical sensing capability open interesting possibilities in the early detection of solid tumor as well as in the development of all-in-one soft surgical robots that can perform visual/mechanical feedback and optical therapy.</p>","PeriodicalId":21698,"journal":{"name":"Sensors","volume":"23 12","pages":""},"PeriodicalIF":3.5000,"publicationDate":"2023-06-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10302895/pdf/","citationCount":"2","resultStr":"{\"title\":\"Transparent Pneumatic Tactile Sensors for Soft Biomedical Robotics.\",\"authors\":\"Sinuo Zhao, Chi Cong Nguyen, Trung Thien Hoang, Thanh Nho Do, Hoang-Phuong Phan\",\"doi\":\"10.3390/s23125671\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Palpation is a simple but effective method to distinguish tumors from healthy tissues. The development of miniaturized tactile sensors embedded on endoscopic or robotic devices is key to achieving precise palpation diagnosis and subsequent timely treatment. This paper reports on the fabrication and characterization of a novel tactile sensor with mechanical flexibility and optical transparency that can be easily mounted on soft surgical endoscopes and robotics. By utilizing the pneumatic sensing mechanism, the sensor offers a high sensitivity of 1.25 mbar and negligible hysteresis, enabling the detection of phantom tissues with different stiffnesses ranging from 0 to 2.5 MPa. Our configuration, combining pneumatic sensing and hydraulic actuating, also eliminates electrical wiring from the functional elements located at the robot end-effector, thereby enhancing the system safety. The optical transparency path in the sensors together with its mechanical sensing capability open interesting possibilities in the early detection of solid tumor as well as in the development of all-in-one soft surgical robots that can perform visual/mechanical feedback and optical therapy.</p>\",\"PeriodicalId\":21698,\"journal\":{\"name\":\"Sensors\",\"volume\":\"23 12\",\"pages\":\"\"},\"PeriodicalIF\":3.5000,\"publicationDate\":\"2023-06-17\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10302895/pdf/\",\"citationCount\":\"2\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Sensors\",\"FirstCategoryId\":\"103\",\"ListUrlMain\":\"https://doi.org/10.3390/s23125671\",\"RegionNum\":3,\"RegionCategory\":\"综合性期刊\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"CHEMISTRY, ANALYTICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Sensors","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.3390/s23125671","RegionNum":3,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"CHEMISTRY, ANALYTICAL","Score":null,"Total":0}
Transparent Pneumatic Tactile Sensors for Soft Biomedical Robotics.
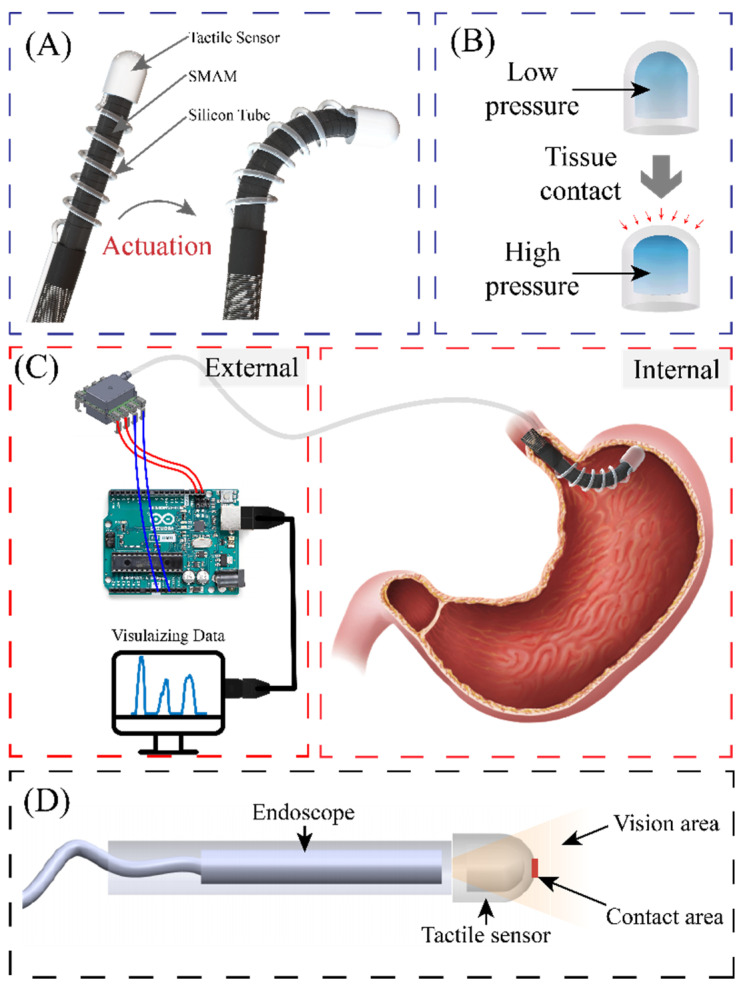
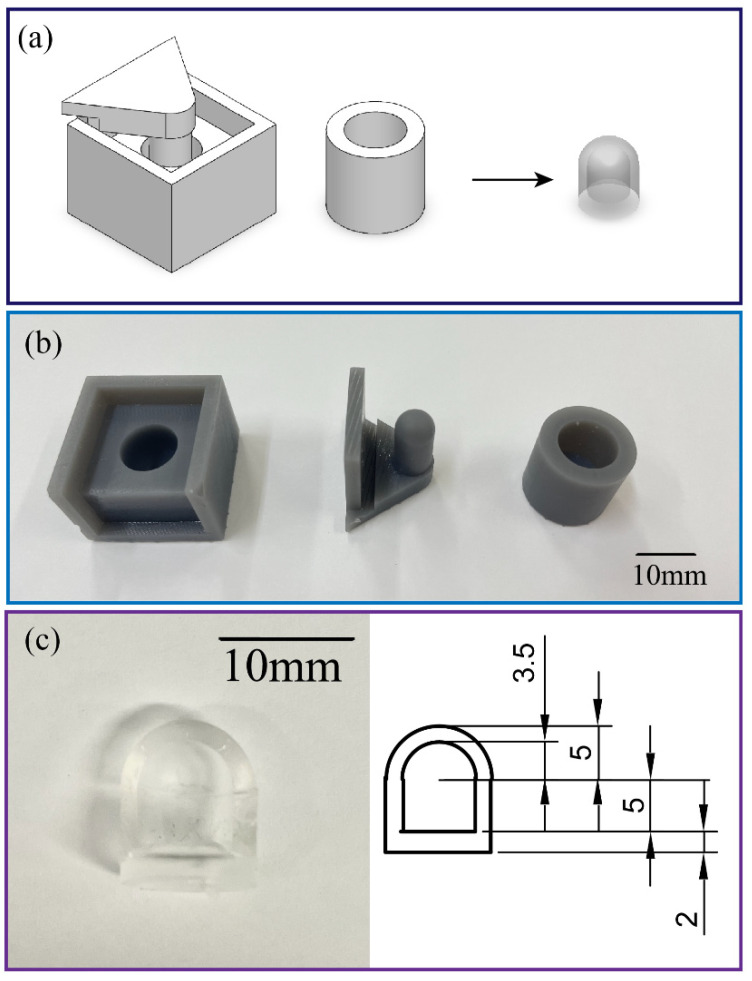
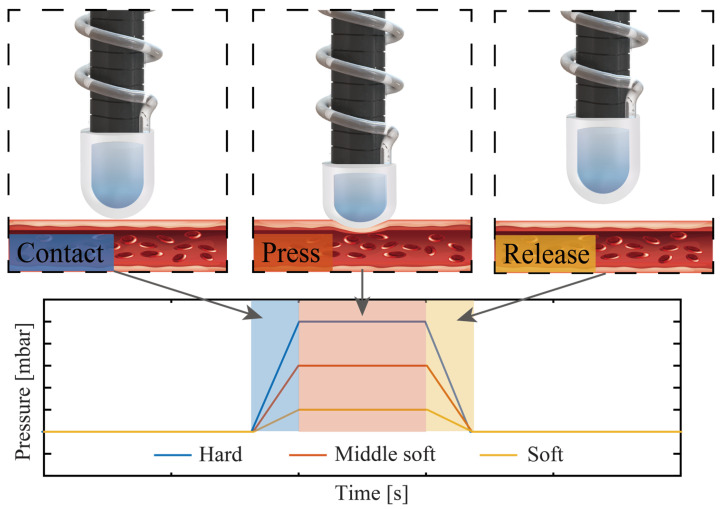
Palpation is a simple but effective method to distinguish tumors from healthy tissues. The development of miniaturized tactile sensors embedded on endoscopic or robotic devices is key to achieving precise palpation diagnosis and subsequent timely treatment. This paper reports on the fabrication and characterization of a novel tactile sensor with mechanical flexibility and optical transparency that can be easily mounted on soft surgical endoscopes and robotics. By utilizing the pneumatic sensing mechanism, the sensor offers a high sensitivity of 1.25 mbar and negligible hysteresis, enabling the detection of phantom tissues with different stiffnesses ranging from 0 to 2.5 MPa. Our configuration, combining pneumatic sensing and hydraulic actuating, also eliminates electrical wiring from the functional elements located at the robot end-effector, thereby enhancing the system safety. The optical transparency path in the sensors together with its mechanical sensing capability open interesting possibilities in the early detection of solid tumor as well as in the development of all-in-one soft surgical robots that can perform visual/mechanical feedback and optical therapy.
期刊介绍:
Sensors (ISSN 1424-8220) provides an advanced forum for the science and technology of sensors and biosensors. It publishes reviews (including comprehensive reviews on the complete sensors products), regular research papers and short notes. Our aim is to encourage scientists to publish their experimental and theoretical results in as much detail as possible. There is no restriction on the length of the papers. The full experimental details must be provided so that the results can be reproduced.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


