{"title":"上下文感知轻量级遥感图像超分辨率网络。","authors":"Guangwen Peng, Minghong Xie, Liuyang Fang","doi":"10.3389/fnbot.2023.1220166","DOIUrl":null,"url":null,"abstract":"<p><p>In recent years, remote-sensing image super-resolution (RSISR) methods based on convolutional neural networks (CNNs) have achieved significant progress. However, the limited receptive field of the convolutional kernel in CNNs hinders the network's ability to effectively capture long-range features in images, thus limiting further improvements in model performance. Additionally, the deployment of existing RSISR models to terminal devices is challenging due to their high computational complexity and large number of parameters. To address these issues, we propose a Context-Aware Lightweight Super-Resolution Network (CALSRN) for remote-sensing images. The proposed network primarily consists of Context-Aware Transformer Blocks (CATBs), which incorporate a Local Context Extraction Branch (LCEB) and a Global Context Extraction Branch (GCEB) to explore both local and global image features. Furthermore, a Dynamic Weight Generation Branch (DWGB) is designed to generate aggregation weights for global and local features, enabling dynamic adjustment of the aggregation process. Specifically, the GCEB employs a Swin Transformer-based structure to obtain global information, while the LCEB utilizes a CNN-based cross-attention mechanism to extract local information. Ultimately, global and local features are aggregated using the weights acquired from the DWGB, capturing the global and local dependencies of the image and enhancing the quality of super-resolution reconstruction. The experimental results demonstrate that the proposed method is capable of reconstructing high-quality images with fewer parameters and less computational complexity compared with existing methods.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"17 ","pages":"1220166"},"PeriodicalIF":2.6000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10326516/pdf/","citationCount":"0","resultStr":"{\"title\":\"Context-aware lightweight remote-sensing image super-resolution network.\",\"authors\":\"Guangwen Peng, Minghong Xie, Liuyang Fang\",\"doi\":\"10.3389/fnbot.2023.1220166\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>In recent years, remote-sensing image super-resolution (RSISR) methods based on convolutional neural networks (CNNs) have achieved significant progress. However, the limited receptive field of the convolutional kernel in CNNs hinders the network's ability to effectively capture long-range features in images, thus limiting further improvements in model performance. Additionally, the deployment of existing RSISR models to terminal devices is challenging due to their high computational complexity and large number of parameters. To address these issues, we propose a Context-Aware Lightweight Super-Resolution Network (CALSRN) for remote-sensing images. The proposed network primarily consists of Context-Aware Transformer Blocks (CATBs), which incorporate a Local Context Extraction Branch (LCEB) and a Global Context Extraction Branch (GCEB) to explore both local and global image features. Furthermore, a Dynamic Weight Generation Branch (DWGB) is designed to generate aggregation weights for global and local features, enabling dynamic adjustment of the aggregation process. Specifically, the GCEB employs a Swin Transformer-based structure to obtain global information, while the LCEB utilizes a CNN-based cross-attention mechanism to extract local information. Ultimately, global and local features are aggregated using the weights acquired from the DWGB, capturing the global and local dependencies of the image and enhancing the quality of super-resolution reconstruction. The experimental results demonstrate that the proposed method is capable of reconstructing high-quality images with fewer parameters and less computational complexity compared with existing methods.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"17 \",\"pages\":\"1220166\"},\"PeriodicalIF\":2.6000,\"publicationDate\":\"2023-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10326516/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2023.1220166\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2023.1220166","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
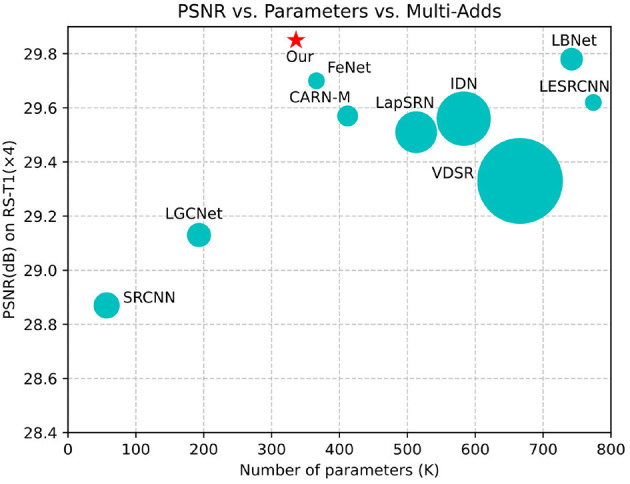
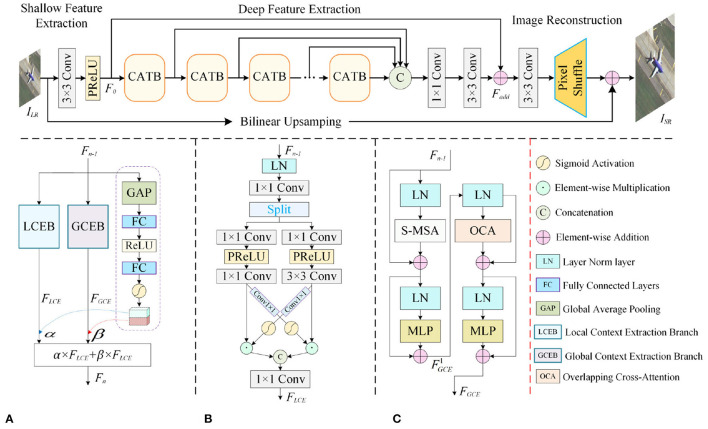
In recent years, remote-sensing image super-resolution (RSISR) methods based on convolutional neural networks (CNNs) have achieved significant progress. However, the limited receptive field of the convolutional kernel in CNNs hinders the network's ability to effectively capture long-range features in images, thus limiting further improvements in model performance. Additionally, the deployment of existing RSISR models to terminal devices is challenging due to their high computational complexity and large number of parameters. To address these issues, we propose a Context-Aware Lightweight Super-Resolution Network (CALSRN) for remote-sensing images. The proposed network primarily consists of Context-Aware Transformer Blocks (CATBs), which incorporate a Local Context Extraction Branch (LCEB) and a Global Context Extraction Branch (GCEB) to explore both local and global image features. Furthermore, a Dynamic Weight Generation Branch (DWGB) is designed to generate aggregation weights for global and local features, enabling dynamic adjustment of the aggregation process. Specifically, the GCEB employs a Swin Transformer-based structure to obtain global information, while the LCEB utilizes a CNN-based cross-attention mechanism to extract local information. Ultimately, global and local features are aggregated using the weights acquired from the DWGB, capturing the global and local dependencies of the image and enhancing the quality of super-resolution reconstruction. The experimental results demonstrate that the proposed method is capable of reconstructing high-quality images with fewer parameters and less computational complexity compared with existing methods.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


