{"title":"基于规划的空间生成谓词建议:一个带有偏好的规划示例。","authors":"Gerard Canal, Carme Torras, Guillem Alenyà","doi":"10.1007/s11257-022-09327-w","DOIUrl":null,"url":null,"abstract":"<p><p>Task planning in human-robot environments tends to be particularly complex as it involves additional uncertainty introduced by the human user. Several plans, entailing few or various differences, can be obtained to solve the same given task. To choose among them, the usual least-cost plan criteria is not necessarily the best option, because here, human constraints and preferences come into play. Knowing these user preferences is very valuable to select an appropriate plan, but the preference values are usually hard to obtain. In this context, we propose the Space-of-Plans-based Suggestions (SoPS) algorithms that can provide suggestions for some planning predicates, which are used to define the state of the environment in a task planning problem where actions modify the predicates. We denote these predicates as <i>suggestible predicates</i>, of which user preferences are a particular case. The first algorithm is able to analyze the potential effect of the unknown predicates and provide suggestions to values for these unknown predicates that may produce better plans. The second algorithm is able to suggest changes to already known values that potentially improve the obtained reward. The proposed approach utilizes a Space of Plans Tree structure to represent a subset of the space of plans. The tree is traversed to find the predicates and the values that would most increase the reward, and output them as a suggestion to the user. Our evaluation in three preference-based assistive robotics domains shows how the proposed algorithms can improve task performance by suggesting the most effective predicate values first.</p>","PeriodicalId":49388,"journal":{"name":"User Modeling and User-Adapted Interaction","volume":"33 2","pages":"333-357"},"PeriodicalIF":3.5000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10147776/pdf/","citationCount":"1","resultStr":"{\"title\":\"Generating predicate suggestions based on the space of plans: an example of planning with preferences.\",\"authors\":\"Gerard Canal, Carme Torras, Guillem Alenyà\",\"doi\":\"10.1007/s11257-022-09327-w\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Task planning in human-robot environments tends to be particularly complex as it involves additional uncertainty introduced by the human user. Several plans, entailing few or various differences, can be obtained to solve the same given task. To choose among them, the usual least-cost plan criteria is not necessarily the best option, because here, human constraints and preferences come into play. Knowing these user preferences is very valuable to select an appropriate plan, but the preference values are usually hard to obtain. In this context, we propose the Space-of-Plans-based Suggestions (SoPS) algorithms that can provide suggestions for some planning predicates, which are used to define the state of the environment in a task planning problem where actions modify the predicates. We denote these predicates as <i>suggestible predicates</i>, of which user preferences are a particular case. The first algorithm is able to analyze the potential effect of the unknown predicates and provide suggestions to values for these unknown predicates that may produce better plans. The second algorithm is able to suggest changes to already known values that potentially improve the obtained reward. The proposed approach utilizes a Space of Plans Tree structure to represent a subset of the space of plans. The tree is traversed to find the predicates and the values that would most increase the reward, and output them as a suggestion to the user. Our evaluation in three preference-based assistive robotics domains shows how the proposed algorithms can improve task performance by suggesting the most effective predicate values first.</p>\",\"PeriodicalId\":49388,\"journal\":{\"name\":\"User Modeling and User-Adapted Interaction\",\"volume\":\"33 2\",\"pages\":\"333-357\"},\"PeriodicalIF\":3.5000,\"publicationDate\":\"2023-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10147776/pdf/\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"User Modeling and User-Adapted Interaction\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s11257-022-09327-w\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, CYBERNETICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"User Modeling and User-Adapted Interaction","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s11257-022-09327-w","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, CYBERNETICS","Score":null,"Total":0}
Generating predicate suggestions based on the space of plans: an example of planning with preferences.
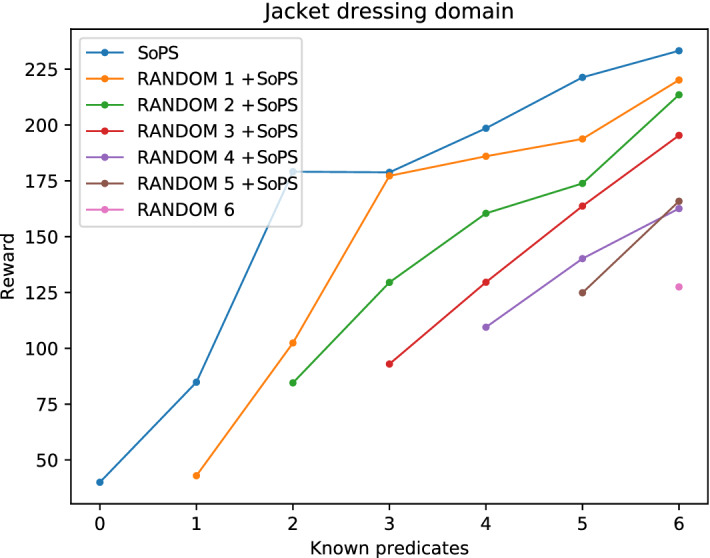
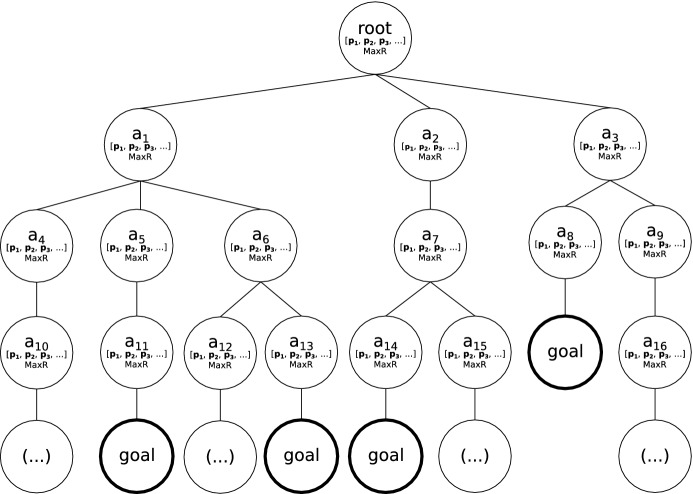
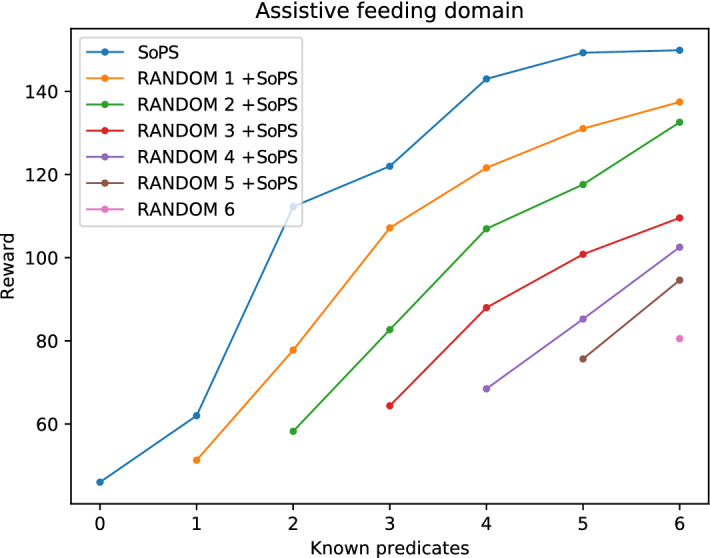
Task planning in human-robot environments tends to be particularly complex as it involves additional uncertainty introduced by the human user. Several plans, entailing few or various differences, can be obtained to solve the same given task. To choose among them, the usual least-cost plan criteria is not necessarily the best option, because here, human constraints and preferences come into play. Knowing these user preferences is very valuable to select an appropriate plan, but the preference values are usually hard to obtain. In this context, we propose the Space-of-Plans-based Suggestions (SoPS) algorithms that can provide suggestions for some planning predicates, which are used to define the state of the environment in a task planning problem where actions modify the predicates. We denote these predicates as suggestible predicates, of which user preferences are a particular case. The first algorithm is able to analyze the potential effect of the unknown predicates and provide suggestions to values for these unknown predicates that may produce better plans. The second algorithm is able to suggest changes to already known values that potentially improve the obtained reward. The proposed approach utilizes a Space of Plans Tree structure to represent a subset of the space of plans. The tree is traversed to find the predicates and the values that would most increase the reward, and output them as a suggestion to the user. Our evaluation in three preference-based assistive robotics domains shows how the proposed algorithms can improve task performance by suggesting the most effective predicate values first.
期刊介绍:
User Modeling and User-Adapted Interaction provides an interdisciplinary forum for the dissemination of novel and significant original research results about interactive computer systems that can adapt themselves to their users, and on the design, use, and evaluation of user models for adaptation. The journal publishes high-quality original papers from, e.g., the following areas: acquisition and formal representation of user models; conceptual models and user stereotypes for personalization; student modeling and adaptive learning; models of groups of users; user model driven personalised information discovery and retrieval; recommender systems; adaptive user interfaces and agents; adaptation for accessibility and inclusion; generic user modeling systems and tools; interoperability of user models; personalization in areas such as; affective computing; ubiquitous and mobile computing; language based interactions; multi-modal interactions; virtual and augmented reality; social media and the Web; human-robot interaction; behaviour change interventions; personalized applications in specific domains; privacy, accountability, and security of information for personalization; responsible adaptation: fairness, accountability, explainability, transparency and control; methods for the design and evaluation of user models and adaptive systems

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


