{"title":"组合三个单摄像头图像进行三摄像头交叉口分类","authors":"Marcella Astrid, Seung-Ik Lee","doi":"10.4218/etrij.2023-0100","DOIUrl":null,"url":null,"abstract":"<p>Determining whether an autonomous self-driving agent is in the middle of an intersection can be extremely difficult when relying on visual input taken from a single camera. In such a problem setting, a wider range of views is essential, which drives us to use three cameras positioned in the front, left, and right of an agent for better intersection recognition. However, collecting adequate training data with three cameras poses several practical difficulties; hence, we propose using data collected from <i>one camera</i> to train a <i>three-camera</i> model, which would enable us to more easily compile a variety of training data to endow our model with improved generalizability. In this work, we provide three separate fusion methods (feature, early, and late) of combining the information from three cameras. Extensive pedestrian-view intersection classification experiments show that our feature fusion model provides an area under the curve and F1-score of 82.00 and 46.48, respectively, which considerably outperforms contemporary three- and one-camera models.</p>","PeriodicalId":11901,"journal":{"name":"ETRI Journal","volume":"45 5","pages":"862-873"},"PeriodicalIF":1.3000,"publicationDate":"2023-10-29","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"1","resultStr":"{\"title\":\"Assembling three one-camera images for three-camera intersection classification\",\"authors\":\"Marcella Astrid, Seung-Ik Lee\",\"doi\":\"10.4218/etrij.2023-0100\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Determining whether an autonomous self-driving agent is in the middle of an intersection can be extremely difficult when relying on visual input taken from a single camera. In such a problem setting, a wider range of views is essential, which drives us to use three cameras positioned in the front, left, and right of an agent for better intersection recognition. However, collecting adequate training data with three cameras poses several practical difficulties; hence, we propose using data collected from <i>one camera</i> to train a <i>three-camera</i> model, which would enable us to more easily compile a variety of training data to endow our model with improved generalizability. In this work, we provide three separate fusion methods (feature, early, and late) of combining the information from three cameras. Extensive pedestrian-view intersection classification experiments show that our feature fusion model provides an area under the curve and F1-score of 82.00 and 46.48, respectively, which considerably outperforms contemporary three- and one-camera models.</p>\",\"PeriodicalId\":11901,\"journal\":{\"name\":\"ETRI Journal\",\"volume\":\"45 5\",\"pages\":\"862-873\"},\"PeriodicalIF\":1.3000,\"publicationDate\":\"2023-10-29\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"ETRI Journal\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.4218/etrij.2023-0100\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"ETRI Journal","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.4218/etrij.2023-0100","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Assembling three one-camera images for three-camera intersection classification
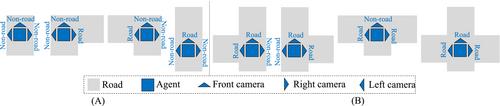
Determining whether an autonomous self-driving agent is in the middle of an intersection can be extremely difficult when relying on visual input taken from a single camera. In such a problem setting, a wider range of views is essential, which drives us to use three cameras positioned in the front, left, and right of an agent for better intersection recognition. However, collecting adequate training data with three cameras poses several practical difficulties; hence, we propose using data collected from one camera to train a three-camera model, which would enable us to more easily compile a variety of training data to endow our model with improved generalizability. In this work, we provide three separate fusion methods (feature, early, and late) of combining the information from three cameras. Extensive pedestrian-view intersection classification experiments show that our feature fusion model provides an area under the curve and F1-score of 82.00 and 46.48, respectively, which considerably outperforms contemporary three- and one-camera models.
期刊介绍:
ETRI Journal is an international, peer-reviewed multidisciplinary journal published bimonthly in English. The main focus of the journal is to provide an open forum to exchange innovative ideas and technology in the fields of information, telecommunications, and electronics.
Key topics of interest include high-performance computing, big data analytics, cloud computing, multimedia technology, communication networks and services, wireless communications and mobile computing, material and component technology, as well as security.
With an international editorial committee and experts from around the world as reviewers, ETRI Journal publishes high-quality research papers on the latest and best developments from the global community.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


