{"title":"基于三维激光雷达点云的移动机器人三维多人实时检测与跟踪","authors":"Ki-In Na, Byungjae Park","doi":"10.4218/etrij.2023-0116","DOIUrl":null,"url":null,"abstract":"<p>Mobile robots are used in modern life; however, object recognition is still insufficient to realize robot navigation in crowded environments. Mobile robots must rapidly and accurately recognize the movements and shapes of pedestrians to navigate safely in pedestrian-rich spaces. This study proposes real-time, accurate, three-dimensional (3D) multi-pedestrian detection and tracking using a 3D light detection and ranging (LiDAR) point cloud in crowded environments. The pedestrian detection quickly segments a sparse 3D point cloud into individual pedestrians using a lightweight convolutional autoencoder and connected-component algorithm. The multi-pedestrian tracking identifies the same pedestrians considering motion and appearance cues in continuing frames. In addition, it estimates pedestrians' dynamic movements with various patterns by adaptively mixing heterogeneous motion models. We evaluate the computational speed and accuracy of each module using the KITTI dataset. We demonstrate that our integrated system, which rapidly and accurately recognizes pedestrian movement and appearance using a sparse 3D LiDAR, is applicable for robot navigation in crowded spaces.</p>","PeriodicalId":11901,"journal":{"name":"ETRI Journal","volume":"45 5","pages":"836-846"},"PeriodicalIF":1.3000,"publicationDate":"2023-09-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"1","resultStr":"{\"title\":\"Real-time 3D multi-pedestrian detection and tracking using 3D LiDAR point cloud for mobile robot\",\"authors\":\"Ki-In Na, Byungjae Park\",\"doi\":\"10.4218/etrij.2023-0116\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Mobile robots are used in modern life; however, object recognition is still insufficient to realize robot navigation in crowded environments. Mobile robots must rapidly and accurately recognize the movements and shapes of pedestrians to navigate safely in pedestrian-rich spaces. This study proposes real-time, accurate, three-dimensional (3D) multi-pedestrian detection and tracking using a 3D light detection and ranging (LiDAR) point cloud in crowded environments. The pedestrian detection quickly segments a sparse 3D point cloud into individual pedestrians using a lightweight convolutional autoencoder and connected-component algorithm. The multi-pedestrian tracking identifies the same pedestrians considering motion and appearance cues in continuing frames. In addition, it estimates pedestrians' dynamic movements with various patterns by adaptively mixing heterogeneous motion models. We evaluate the computational speed and accuracy of each module using the KITTI dataset. We demonstrate that our integrated system, which rapidly and accurately recognizes pedestrian movement and appearance using a sparse 3D LiDAR, is applicable for robot navigation in crowded spaces.</p>\",\"PeriodicalId\":11901,\"journal\":{\"name\":\"ETRI Journal\",\"volume\":\"45 5\",\"pages\":\"836-846\"},\"PeriodicalIF\":1.3000,\"publicationDate\":\"2023-09-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"ETRI Journal\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.4218/etrij.2023-0116\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"ETRI Journal","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.4218/etrij.2023-0116","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Real-time 3D multi-pedestrian detection and tracking using 3D LiDAR point cloud for mobile robot
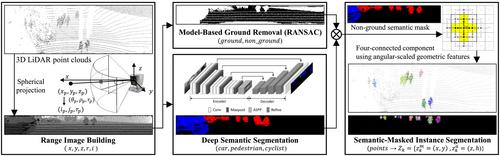
Mobile robots are used in modern life; however, object recognition is still insufficient to realize robot navigation in crowded environments. Mobile robots must rapidly and accurately recognize the movements and shapes of pedestrians to navigate safely in pedestrian-rich spaces. This study proposes real-time, accurate, three-dimensional (3D) multi-pedestrian detection and tracking using a 3D light detection and ranging (LiDAR) point cloud in crowded environments. The pedestrian detection quickly segments a sparse 3D point cloud into individual pedestrians using a lightweight convolutional autoencoder and connected-component algorithm. The multi-pedestrian tracking identifies the same pedestrians considering motion and appearance cues in continuing frames. In addition, it estimates pedestrians' dynamic movements with various patterns by adaptively mixing heterogeneous motion models. We evaluate the computational speed and accuracy of each module using the KITTI dataset. We demonstrate that our integrated system, which rapidly and accurately recognizes pedestrian movement and appearance using a sparse 3D LiDAR, is applicable for robot navigation in crowded spaces.
期刊介绍:
ETRI Journal is an international, peer-reviewed multidisciplinary journal published bimonthly in English. The main focus of the journal is to provide an open forum to exchange innovative ideas and technology in the fields of information, telecommunications, and electronics.
Key topics of interest include high-performance computing, big data analytics, cloud computing, multimedia technology, communication networks and services, wireless communications and mobile computing, material and component technology, as well as security.
With an international editorial committee and experts from around the world as reviewers, ETRI Journal publishes high-quality research papers on the latest and best developments from the global community.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


