{"title":"速率表的移除:带有虚拟五月标记的MEMS陀螺罗盘。","authors":"Tongqiao Miao, Qingsong Li, Liangqian Chen, Junjian Li, Xiaoping Hu, Xuezhong Wu, Wenqi Wu, Dingbang Xiao","doi":"10.1038/s41378-023-00610-3","DOIUrl":null,"url":null,"abstract":"<p><p>High-performance micro-electro-mechanical system (MEMS) gyrocompasses for north-finding systems have been very popular for decades. In this paper, a MEMS north-finding system (NFS) based on virtual maytagging (VM) is presented for the first time. In stark contrast to previous schemes of MEMS-based NFSs (e.g., carouseling, maytagging) and the abandoning rate table, we developed a honeycomb disk resonator gyroscope (HDRG) and two commercial accelerometers for azimuth detection. Instead of the physical rotation of the integrated turntable in traditional NFSs, the vibratory working modes of the HDRG are rotated periodically with electronic control to reduce the uncertainty in the azimuth. After systematically analyzing the principle of NFSs with VM, we designed tests to verify the practicability at the sensor level. A bias instability of 0.0078°/h can be obtained during one day with VM in an HDRG. We also implemented comparative north-finding experiments to further check our strategy at the system level. The accuracy in the azimuth can reach 0.204° for 5 min at 28.2° latitude with VM and 0.172° with maytagging. The results show that without any mechanical turning parts, VM technology makes it possible to develop high-precision handheld MEMS NFSs.</p>","PeriodicalId":18560,"journal":{"name":"Microsystems & Nanoengineering","volume":"9 ","pages":"138"},"PeriodicalIF":7.3000,"publicationDate":"2023-11-06","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10628254/pdf/","citationCount":"0","resultStr":"{\"title\":\"Removal of the rate table: MEMS gyrocompass with virtual maytagging.\",\"authors\":\"Tongqiao Miao, Qingsong Li, Liangqian Chen, Junjian Li, Xiaoping Hu, Xuezhong Wu, Wenqi Wu, Dingbang Xiao\",\"doi\":\"10.1038/s41378-023-00610-3\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>High-performance micro-electro-mechanical system (MEMS) gyrocompasses for north-finding systems have been very popular for decades. In this paper, a MEMS north-finding system (NFS) based on virtual maytagging (VM) is presented for the first time. In stark contrast to previous schemes of MEMS-based NFSs (e.g., carouseling, maytagging) and the abandoning rate table, we developed a honeycomb disk resonator gyroscope (HDRG) and two commercial accelerometers for azimuth detection. Instead of the physical rotation of the integrated turntable in traditional NFSs, the vibratory working modes of the HDRG are rotated periodically with electronic control to reduce the uncertainty in the azimuth. After systematically analyzing the principle of NFSs with VM, we designed tests to verify the practicability at the sensor level. A bias instability of 0.0078°/h can be obtained during one day with VM in an HDRG. We also implemented comparative north-finding experiments to further check our strategy at the system level. The accuracy in the azimuth can reach 0.204° for 5 min at 28.2° latitude with VM and 0.172° with maytagging. The results show that without any mechanical turning parts, VM technology makes it possible to develop high-precision handheld MEMS NFSs.</p>\",\"PeriodicalId\":18560,\"journal\":{\"name\":\"Microsystems & Nanoengineering\",\"volume\":\"9 \",\"pages\":\"138\"},\"PeriodicalIF\":7.3000,\"publicationDate\":\"2023-11-06\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10628254/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Microsystems & Nanoengineering\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1038/s41378-023-00610-3\",\"RegionNum\":1,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2023/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q1\",\"JCRName\":\"INSTRUMENTS & INSTRUMENTATION\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Microsystems & Nanoengineering","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1038/s41378-023-00610-3","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/1/1 0:00:00","PubModel":"eCollection","JCR":"Q1","JCRName":"INSTRUMENTS & INSTRUMENTATION","Score":null,"Total":0}
Removal of the rate table: MEMS gyrocompass with virtual maytagging.
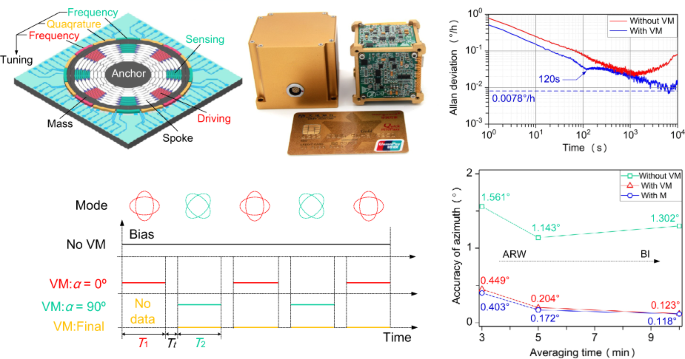
High-performance micro-electro-mechanical system (MEMS) gyrocompasses for north-finding systems have been very popular for decades. In this paper, a MEMS north-finding system (NFS) based on virtual maytagging (VM) is presented for the first time. In stark contrast to previous schemes of MEMS-based NFSs (e.g., carouseling, maytagging) and the abandoning rate table, we developed a honeycomb disk resonator gyroscope (HDRG) and two commercial accelerometers for azimuth detection. Instead of the physical rotation of the integrated turntable in traditional NFSs, the vibratory working modes of the HDRG are rotated periodically with electronic control to reduce the uncertainty in the azimuth. After systematically analyzing the principle of NFSs with VM, we designed tests to verify the practicability at the sensor level. A bias instability of 0.0078°/h can be obtained during one day with VM in an HDRG. We also implemented comparative north-finding experiments to further check our strategy at the system level. The accuracy in the azimuth can reach 0.204° for 5 min at 28.2° latitude with VM and 0.172° with maytagging. The results show that without any mechanical turning parts, VM technology makes it possible to develop high-precision handheld MEMS NFSs.
期刊介绍:
Microsystems & Nanoengineering is a comprehensive online journal that focuses on the field of Micro and Nano Electro Mechanical Systems (MEMS and NEMS). It provides a platform for researchers to share their original research findings and review articles in this area. The journal covers a wide range of topics, from fundamental research to practical applications. Published by Springer Nature, in collaboration with the Aerospace Information Research Institute, Chinese Academy of Sciences, and with the support of the State Key Laboratory of Transducer Technology, it is an esteemed publication in the field. As an open access journal, it offers free access to its content, allowing readers from around the world to benefit from the latest developments in MEMS and NEMS.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


