不敏感和可重复使用的真皮表面肌电图用于下肢神经假体控制和临床评估
IF 12.3
1区 材料科学
Q1 ENGINEERING, ELECTRICAL & ELECTRONIC
引用次数: 0
摘要
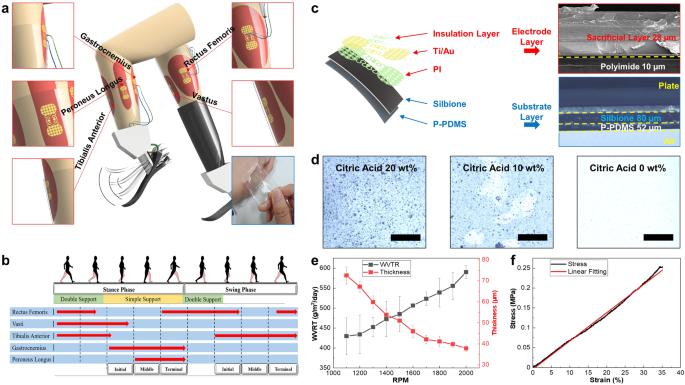
表面肌电(sEMG)传感器在诊断肌肉状况和实现假肢设备控制方面发挥着关键作用,尤其是在下肢机器人腿方面。然而,当在截肢者佩戴的硅内衬内的残余肢体上使用这种传感器时,会出现挑战,其中动态压力、狭窄空间和汗液会对传感器性能产生负面影响。现有的商用sEMG传感器和新开发的传感器由于尺寸和厚度而不合适,或者在这种环境中容易损坏。在本文中,我们的sEMG传感器是为佩戴插座的截肢者量身定制的,优先考虑透气性、耐用性和可靠的记录性能。通过使用多孔PDMS和Silbione基底,我们的设计实现了卓越的渗透性和粘合性能。对蛇形电极图案和设计进行了优化,以提高拉伸性、耐用性和有效接触面积,从而获得比传统电极更高的信噪比(SNR)。值得注意的是,我们提出的传感器能够无线控制截肢者的机器人腿,证明了其实际可行性,并有望在不久的将来推动临床研究领域的神经假体控制。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Imperceptive and reusable dermal surface EMG for lower extremity neuro-prosthetic control and clinical assessment
Surface electromyography (sEMG) sensors play a critical role in diagnosing muscle conditions and enabling prosthetic device control, especially for lower extremity robotic legs. However, challenges arise when utilizing such sensors on residual limbs within a silicon liner worn by amputees, where dynamic pressure, narrow space, and perspiration can negatively affect sensor performance. Existing commercial sEMG sensors and newly developed sensors are unsuitable due to size and thickness, or susceptible to damage in this environment. In this paper, our sEMG sensors are tailored for amputees wearing sockets, prioritizing breathability, durability, and reliable recording performance. By employing porous PDMS and Silbione substrates, our design achieves exceptional permeability and adhesive properties. The serpentine electrode pattern and design are optimized to improve stretchability, durability, and effective contact area, resulting in a higher signal-to-noise ratio (SNR) than conventional electrodes. Notably, our proposed sensors wirelessly enable to control of a robotic leg for amputees, demonstrating its practical feasibility and expecting to drive forward neuro-prosthetic control in the clinical research field near future.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

npj Flexible Electronics
Multiple-
CiteScore
17.10
自引率
4.80%
发文量
91
审稿时长
6 weeks
期刊介绍:
npj Flexible Electronics is an online-only and open access journal, which publishes high-quality papers related to flexible electronic systems, including plastic electronics and emerging materials, new device design and fabrication technologies, and applications.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


