Adrian-Paul Botezatu, Lavinia-Eugenia Ferariu, Adrian Burlacu
{"title":"通过早期融合深度学习增强视觉反馈控制。","authors":"Adrian-Paul Botezatu, Lavinia-Eugenia Ferariu, Adrian Burlacu","doi":"10.3390/e25101378","DOIUrl":null,"url":null,"abstract":"<p><p>A visual servoing system is a type of control system used in robotics that employs visual feedback to guide the movement of a robot or a camera to achieve a desired task. This problem is addressed using deep models that receive a visual representation of the current and desired scene, to compute the control input. The focus is on early fusion, which consists of using additional information integrated into the neural input array. In this context, we discuss how ready-to-use information can be directly obtained from the current and desired scenes, to facilitate the learning process. Inspired by some of the most effective traditional visual servoing techniques, we introduce early fusion based on image moments and provide an extensive analysis of approaches based on image moments, region-based segmentation, and feature points. These techniques are applied stand-alone or in combination, to allow obtaining maps with different levels of detail. The role of the extra maps is experimentally investigated for scenes with different layouts. The results show that early fusion facilitates a more accurate approximation of the linear and angular camera velocities, in order to control the movement of a 6-degree-of-freedom robot from a current configuration to a desired one. The best results were obtained for the extra maps providing details of low and medium levels.</p>","PeriodicalId":11694,"journal":{"name":"Entropy","volume":"25 10","pages":""},"PeriodicalIF":2.1000,"publicationDate":"2023-09-25","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10606400/pdf/","citationCount":"0","resultStr":"{\"title\":\"Enhancing Visual Feedback Control through Early Fusion Deep Learning.\",\"authors\":\"Adrian-Paul Botezatu, Lavinia-Eugenia Ferariu, Adrian Burlacu\",\"doi\":\"10.3390/e25101378\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>A visual servoing system is a type of control system used in robotics that employs visual feedback to guide the movement of a robot or a camera to achieve a desired task. This problem is addressed using deep models that receive a visual representation of the current and desired scene, to compute the control input. The focus is on early fusion, which consists of using additional information integrated into the neural input array. In this context, we discuss how ready-to-use information can be directly obtained from the current and desired scenes, to facilitate the learning process. Inspired by some of the most effective traditional visual servoing techniques, we introduce early fusion based on image moments and provide an extensive analysis of approaches based on image moments, region-based segmentation, and feature points. These techniques are applied stand-alone or in combination, to allow obtaining maps with different levels of detail. The role of the extra maps is experimentally investigated for scenes with different layouts. The results show that early fusion facilitates a more accurate approximation of the linear and angular camera velocities, in order to control the movement of a 6-degree-of-freedom robot from a current configuration to a desired one. The best results were obtained for the extra maps providing details of low and medium levels.</p>\",\"PeriodicalId\":11694,\"journal\":{\"name\":\"Entropy\",\"volume\":\"25 10\",\"pages\":\"\"},\"PeriodicalIF\":2.1000,\"publicationDate\":\"2023-09-25\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10606400/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Entropy\",\"FirstCategoryId\":\"101\",\"ListUrlMain\":\"https://doi.org/10.3390/e25101378\",\"RegionNum\":3,\"RegionCategory\":\"物理与天体物理\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"PHYSICS, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Entropy","FirstCategoryId":"101","ListUrlMain":"https://doi.org/10.3390/e25101378","RegionNum":3,"RegionCategory":"物理与天体物理","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"PHYSICS, MULTIDISCIPLINARY","Score":null,"Total":0}
Enhancing Visual Feedback Control through Early Fusion Deep Learning.
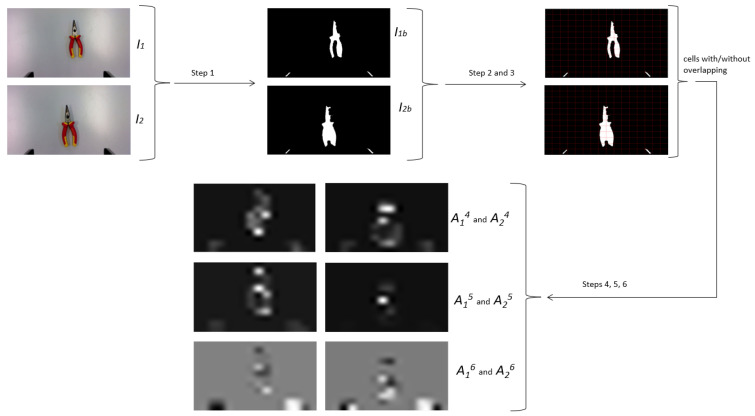
A visual servoing system is a type of control system used in robotics that employs visual feedback to guide the movement of a robot or a camera to achieve a desired task. This problem is addressed using deep models that receive a visual representation of the current and desired scene, to compute the control input. The focus is on early fusion, which consists of using additional information integrated into the neural input array. In this context, we discuss how ready-to-use information can be directly obtained from the current and desired scenes, to facilitate the learning process. Inspired by some of the most effective traditional visual servoing techniques, we introduce early fusion based on image moments and provide an extensive analysis of approaches based on image moments, region-based segmentation, and feature points. These techniques are applied stand-alone or in combination, to allow obtaining maps with different levels of detail. The role of the extra maps is experimentally investigated for scenes with different layouts. The results show that early fusion facilitates a more accurate approximation of the linear and angular camera velocities, in order to control the movement of a 6-degree-of-freedom robot from a current configuration to a desired one. The best results were obtained for the extra maps providing details of low and medium levels.
期刊介绍:
Entropy (ISSN 1099-4300), an international and interdisciplinary journal of entropy and information studies, publishes reviews, regular research papers and short notes. Our aim is to encourage scientists to publish as much as possible their theoretical and experimental details. There is no restriction on the length of the papers. If there are computation and the experiment, the details must be provided so that the results can be reproduced.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


