方位约束下三维传感器的标定
IF 0.6
4区 计算机科学
Q4 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
摘要
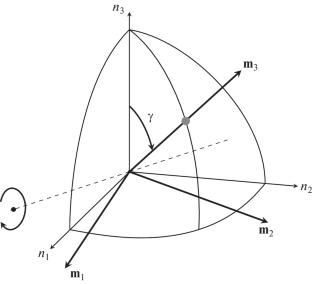
三维(3D)传感器通常需要校准程序。在一些情况下,比例因子误差取决于矢量输入信号在传感器的灵敏度轴上的投影的符号。为了消除比例因子误差的模糊性,可以限制传感器的角位置,使相应的投影具有确定性符号。本文给出了三维传感器在角位置约束下的最优校准问题的解析解。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Calibration of a 3D Sensor under Its Orientation Constraint
Three-dimensional (3D) sensors usually require a calibration procedure. In some cases, scale factor errors depend on the signs of the projections of the vector input signal onto the sensitivity axes of the sensor. To eliminate the ambiguity of scale factor errors, the angular positions of the sensor can be restricted so that the corresponding projections have a definite sign. This paper presents an analytical solution of the optimal calibration problem for a 3D sensor under a constraint on its angular positions.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Automation and Remote Control
工程技术-仪器仪表
CiteScore
1.70
自引率
28.60%
发文量
90
审稿时长
3-8 weeks
期刊介绍:
Automation and Remote Control is one of the first journals on control theory. The scope of the journal is control theory problems and applications. The journal publishes reviews, original articles, and short communications (deterministic, stochastic, adaptive, and robust formulations) and its applications (computer control, components and instruments, process control, social and economy control, etc.).
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


