{"title":"用于多尺度环境过程建模和预测的异构机器人团队","authors":"Tahiya Salam, M. Ani Hsieh","doi":"10.1007/s10514-023-10089-6","DOIUrl":null,"url":null,"abstract":"<div><p>This paper presents a framework to enable a team of heterogeneous mobile robots to model and sense a multiscale system. We propose a coupled strategy, where robots of one type collect high-fidelity measurements at a slow time scale and robots of another type collect low-fidelity measurements at a fast time scale, for the purpose of fusing measurements together. The multiscale measurements are fused to create a model of a complex, nonlinear spatiotemporal process. The model helps determine optimal sensing locations and predict the evolution of the process. Key contributions are: (i) consolidation of multiple types of data into one cohesive model, (ii) fast determination of optimal sensing locations for mobile robots, and (iii) adaptation of models online for various monitoring scenarios. We illustrate the proposed framework by modeling and predicting the evolution of an artificial plasma cloud. We test our approach using physical marine robots adaptively sampling a process in a water tank.</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 4","pages":"353 - 376"},"PeriodicalIF":3.7000,"publicationDate":"2023-04-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"5","resultStr":"{\"title\":\"Heterogeneous robot teams for modeling and prediction of multiscale environmental processes\",\"authors\":\"Tahiya Salam, M. Ani Hsieh\",\"doi\":\"10.1007/s10514-023-10089-6\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>This paper presents a framework to enable a team of heterogeneous mobile robots to model and sense a multiscale system. We propose a coupled strategy, where robots of one type collect high-fidelity measurements at a slow time scale and robots of another type collect low-fidelity measurements at a fast time scale, for the purpose of fusing measurements together. The multiscale measurements are fused to create a model of a complex, nonlinear spatiotemporal process. The model helps determine optimal sensing locations and predict the evolution of the process. Key contributions are: (i) consolidation of multiple types of data into one cohesive model, (ii) fast determination of optimal sensing locations for mobile robots, and (iii) adaptation of models online for various monitoring scenarios. We illustrate the proposed framework by modeling and predicting the evolution of an artificial plasma cloud. We test our approach using physical marine robots adaptively sampling a process in a water tank.</p></div>\",\"PeriodicalId\":55409,\"journal\":{\"name\":\"Autonomous Robots\",\"volume\":\"47 4\",\"pages\":\"353 - 376\"},\"PeriodicalIF\":3.7000,\"publicationDate\":\"2023-04-19\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"5\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Robots\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10514-023-10089-6\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10089-6","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Heterogeneous robot teams for modeling and prediction of multiscale environmental processes
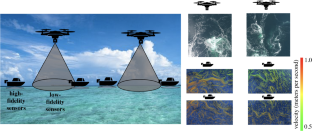
This paper presents a framework to enable a team of heterogeneous mobile robots to model and sense a multiscale system. We propose a coupled strategy, where robots of one type collect high-fidelity measurements at a slow time scale and robots of another type collect low-fidelity measurements at a fast time scale, for the purpose of fusing measurements together. The multiscale measurements are fused to create a model of a complex, nonlinear spatiotemporal process. The model helps determine optimal sensing locations and predict the evolution of the process. Key contributions are: (i) consolidation of multiple types of data into one cohesive model, (ii) fast determination of optimal sensing locations for mobile robots, and (iii) adaptation of models online for various monitoring scenarios. We illustrate the proposed framework by modeling and predicting the evolution of an artificial plasma cloud. We test our approach using physical marine robots adaptively sampling a process in a water tank.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


