{"title":"基于数值和实验分析的电气化铁路双受电弓架空接触线稳定臂阻尼器研制","authors":"Wenping Chu, Yang Song, Fuchuan Duan, Zhigang Liu","doi":"10.1049/els2.12024","DOIUrl":null,"url":null,"abstract":"<p>To improve the carrying capacity, double pantographs are normally used to collect the electric current from the catenary. The mechanical wave excited by the leading pantograph affects the contact of the trailing pantograph and the contact wire, which usually deteriorates the current collection quality. To address this issue, a steady arm damper is developed in this work to reduce the wave intensity caused by the leading pantograph. The catenary is modelled by Absolute Nodal Coordinate Formulation. The numerical simulations indicate that the steady arm damper with certain values reduces the contact force variation of the trailing pantograph. But overlarge damping may behave as a hard spot and aggravates the interaction performance. The acceptable steady arm damping should be lower than 300 Ns/m. The optimal value of the steady arm damping coefficient varies with the train speed. The realistic damping ratio should be determined based on the operating speed of a railway line. Based on the simulation results, several realistic steady arm dampers are developed, which are placed between the cantilever and the end of the steady arm. An experimental test is conducted to investigate the effect of the steady arm damper on the reduction of vibration caused by the dropping sinker. The experimental results demonstrate that the steady arm damper can reduce the mechanical wave amplitude and eliminate its effect on the trailing pantograph.</p>","PeriodicalId":48518,"journal":{"name":"IET Electrical Systems in Transportation","volume":"11 3","pages":"269-277"},"PeriodicalIF":2.2000,"publicationDate":"2021-04-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ietresearch.onlinelibrary.wiley.com/doi/epdf/10.1049/els2.12024","citationCount":"3","resultStr":"{\"title\":\"Development of steady arm damper for electrified railway overhead contact line with double pantographs based on numerical and experimental analysis\",\"authors\":\"Wenping Chu, Yang Song, Fuchuan Duan, Zhigang Liu\",\"doi\":\"10.1049/els2.12024\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>To improve the carrying capacity, double pantographs are normally used to collect the electric current from the catenary. The mechanical wave excited by the leading pantograph affects the contact of the trailing pantograph and the contact wire, which usually deteriorates the current collection quality. To address this issue, a steady arm damper is developed in this work to reduce the wave intensity caused by the leading pantograph. The catenary is modelled by Absolute Nodal Coordinate Formulation. The numerical simulations indicate that the steady arm damper with certain values reduces the contact force variation of the trailing pantograph. But overlarge damping may behave as a hard spot and aggravates the interaction performance. The acceptable steady arm damping should be lower than 300 Ns/m. The optimal value of the steady arm damping coefficient varies with the train speed. The realistic damping ratio should be determined based on the operating speed of a railway line. Based on the simulation results, several realistic steady arm dampers are developed, which are placed between the cantilever and the end of the steady arm. An experimental test is conducted to investigate the effect of the steady arm damper on the reduction of vibration caused by the dropping sinker. The experimental results demonstrate that the steady arm damper can reduce the mechanical wave amplitude and eliminate its effect on the trailing pantograph.</p>\",\"PeriodicalId\":48518,\"journal\":{\"name\":\"IET Electrical Systems in Transportation\",\"volume\":\"11 3\",\"pages\":\"269-277\"},\"PeriodicalIF\":2.2000,\"publicationDate\":\"2021-04-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://ietresearch.onlinelibrary.wiley.com/doi/epdf/10.1049/els2.12024\",\"citationCount\":\"3\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Electrical Systems in Transportation\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/els2.12024\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Electrical Systems in Transportation","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/els2.12024","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Development of steady arm damper for electrified railway overhead contact line with double pantographs based on numerical and experimental analysis
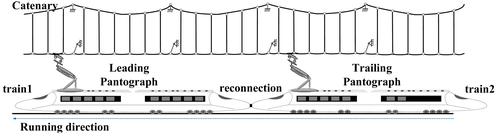
To improve the carrying capacity, double pantographs are normally used to collect the electric current from the catenary. The mechanical wave excited by the leading pantograph affects the contact of the trailing pantograph and the contact wire, which usually deteriorates the current collection quality. To address this issue, a steady arm damper is developed in this work to reduce the wave intensity caused by the leading pantograph. The catenary is modelled by Absolute Nodal Coordinate Formulation. The numerical simulations indicate that the steady arm damper with certain values reduces the contact force variation of the trailing pantograph. But overlarge damping may behave as a hard spot and aggravates the interaction performance. The acceptable steady arm damping should be lower than 300 Ns/m. The optimal value of the steady arm damping coefficient varies with the train speed. The realistic damping ratio should be determined based on the operating speed of a railway line. Based on the simulation results, several realistic steady arm dampers are developed, which are placed between the cantilever and the end of the steady arm. An experimental test is conducted to investigate the effect of the steady arm damper on the reduction of vibration caused by the dropping sinker. The experimental results demonstrate that the steady arm damper can reduce the mechanical wave amplitude and eliminate its effect on the trailing pantograph.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


