{"title":"ProgPrompt:使用大型语言模型生成定位机器人任务规划的程序","authors":"Ishika Singh, Valts Blukis, Arsalan Mousavian, Ankit Goyal, Danfei Xu, Jonathan Tremblay, Dieter Fox, Jesse Thomason, Animesh Garg","doi":"10.1007/s10514-023-10135-3","DOIUrl":null,"url":null,"abstract":"<div><p>Task planning can require defining myriad domain knowledge about the world in which a robot needs to act. To ameliorate that effort, large language models (LLMs) can be used to score potential next actions during task planning, and even generate action sequences directly, given an instruction in natural language with no additional domain information. However, such methods either require enumerating all possible next steps for scoring, or generate free-form text that may contain actions not possible on a given robot in its current context. We present a programmatic LLM prompt structure that enables plan generation functional across situated environments, robot capabilities, and tasks. Our key insight is to prompt the LLM with program-like specifications of the available actions and objects in an environment, as well as with example <span>programs</span> that can be executed. We make concrete recommendations about prompt structure and generation constraints through ablation experiments, demonstrate state of the art success rates in VirtualHome household tasks, and deploy our method on a physical robot arm for tabletop tasks. Website and code at progprompt.github.io</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 8","pages":"999 - 1012"},"PeriodicalIF":4.3000,"publicationDate":"2023-08-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10514-023-10135-3.pdf","citationCount":"10","resultStr":"{\"title\":\"ProgPrompt: program generation for situated robot task planning using large language models\",\"authors\":\"Ishika Singh, Valts Blukis, Arsalan Mousavian, Ankit Goyal, Danfei Xu, Jonathan Tremblay, Dieter Fox, Jesse Thomason, Animesh Garg\",\"doi\":\"10.1007/s10514-023-10135-3\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Task planning can require defining myriad domain knowledge about the world in which a robot needs to act. To ameliorate that effort, large language models (LLMs) can be used to score potential next actions during task planning, and even generate action sequences directly, given an instruction in natural language with no additional domain information. However, such methods either require enumerating all possible next steps for scoring, or generate free-form text that may contain actions not possible on a given robot in its current context. We present a programmatic LLM prompt structure that enables plan generation functional across situated environments, robot capabilities, and tasks. Our key insight is to prompt the LLM with program-like specifications of the available actions and objects in an environment, as well as with example <span>programs</span> that can be executed. We make concrete recommendations about prompt structure and generation constraints through ablation experiments, demonstrate state of the art success rates in VirtualHome household tasks, and deploy our method on a physical robot arm for tabletop tasks. Website and code at progprompt.github.io</p></div>\",\"PeriodicalId\":55409,\"journal\":{\"name\":\"Autonomous Robots\",\"volume\":\"47 8\",\"pages\":\"999 - 1012\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2023-08-28\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://link.springer.com/content/pdf/10.1007/s10514-023-10135-3.pdf\",\"citationCount\":\"10\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Robots\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10514-023-10135-3\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10135-3","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
ProgPrompt: program generation for situated robot task planning using large language models
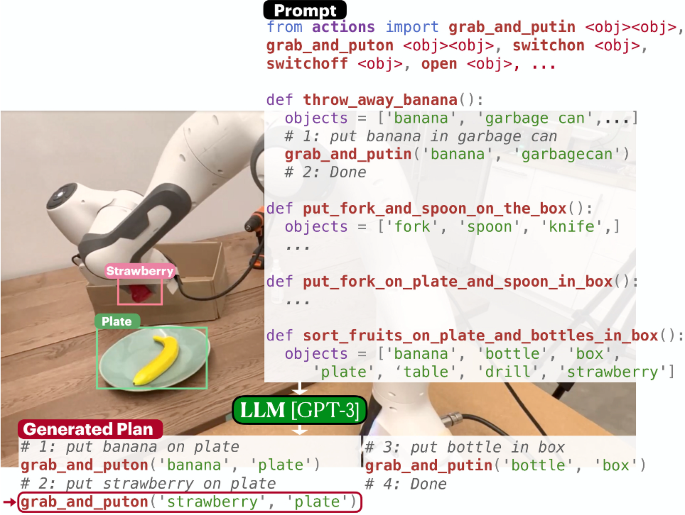
Task planning can require defining myriad domain knowledge about the world in which a robot needs to act. To ameliorate that effort, large language models (LLMs) can be used to score potential next actions during task planning, and even generate action sequences directly, given an instruction in natural language with no additional domain information. However, such methods either require enumerating all possible next steps for scoring, or generate free-form text that may contain actions not possible on a given robot in its current context. We present a programmatic LLM prompt structure that enables plan generation functional across situated environments, robot capabilities, and tasks. Our key insight is to prompt the LLM with program-like specifications of the available actions and objects in an environment, as well as with example programs that can be executed. We make concrete recommendations about prompt structure and generation constraints through ablation experiments, demonstrate state of the art success rates in VirtualHome household tasks, and deploy our method on a physical robot arm for tabletop tasks. Website and code at progprompt.github.io
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


