Rahaf Rahal, Amir M. Ghalamzan-E., Firas Abi-Farraj, Claudio Pacchierotti, Paolo Robuffo Giordano
{"title":"触觉引导抓取,以尽量减少扭矩努力在机器人遥控","authors":"Rahaf Rahal, Amir M. Ghalamzan-E., Firas Abi-Farraj, Claudio Pacchierotti, Paolo Robuffo Giordano","doi":"10.1007/s10514-023-10096-7","DOIUrl":null,"url":null,"abstract":"<div><p>Teleoperating robotic manipulators can be complicated and cognitively demanding for the human operator. Despite these difficulties, teleoperated robotic systems are still popular in several industrial applications, e.g., remote handling of hazardous material. In this context, we present a novel haptic shared control method for minimising the manipulator torque effort during remote manipulative actions in which an operator is assisted in selecting a suitable grasping pose for then displacing an object along a desired trajectory. Minimising torque is important because it reduces the system operating cost and extends the range of objects that can be manipulated. We demonstrate the effectiveness of the proposed approach in a series of representative real-world pick-and-place experiments as well as in a human subjects study. The reported results prove the effectiveness of our shared control vs. a standard teleoperation approach. We also find that haptic-only guidance performs better than visual-only guidance, although combining them together leads to the best overall results.\n</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 4","pages":"405 - 423"},"PeriodicalIF":3.7000,"publicationDate":"2023-04-12","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Haptic-guided grasping to minimise torque effort during robotic telemanipulation\",\"authors\":\"Rahaf Rahal, Amir M. Ghalamzan-E., Firas Abi-Farraj, Claudio Pacchierotti, Paolo Robuffo Giordano\",\"doi\":\"10.1007/s10514-023-10096-7\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Teleoperating robotic manipulators can be complicated and cognitively demanding for the human operator. Despite these difficulties, teleoperated robotic systems are still popular in several industrial applications, e.g., remote handling of hazardous material. In this context, we present a novel haptic shared control method for minimising the manipulator torque effort during remote manipulative actions in which an operator is assisted in selecting a suitable grasping pose for then displacing an object along a desired trajectory. Minimising torque is important because it reduces the system operating cost and extends the range of objects that can be manipulated. We demonstrate the effectiveness of the proposed approach in a series of representative real-world pick-and-place experiments as well as in a human subjects study. The reported results prove the effectiveness of our shared control vs. a standard teleoperation approach. We also find that haptic-only guidance performs better than visual-only guidance, although combining them together leads to the best overall results.\\n</p></div>\",\"PeriodicalId\":55409,\"journal\":{\"name\":\"Autonomous Robots\",\"volume\":\"47 4\",\"pages\":\"405 - 423\"},\"PeriodicalIF\":3.7000,\"publicationDate\":\"2023-04-12\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Robots\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10514-023-10096-7\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10096-7","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Haptic-guided grasping to minimise torque effort during robotic telemanipulation
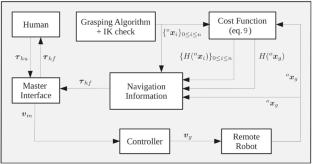
Teleoperating robotic manipulators can be complicated and cognitively demanding for the human operator. Despite these difficulties, teleoperated robotic systems are still popular in several industrial applications, e.g., remote handling of hazardous material. In this context, we present a novel haptic shared control method for minimising the manipulator torque effort during remote manipulative actions in which an operator is assisted in selecting a suitable grasping pose for then displacing an object along a desired trajectory. Minimising torque is important because it reduces the system operating cost and extends the range of objects that can be manipulated. We demonstrate the effectiveness of the proposed approach in a series of representative real-world pick-and-place experiments as well as in a human subjects study. The reported results prove the effectiveness of our shared control vs. a standard teleoperation approach. We also find that haptic-only guidance performs better than visual-only guidance, although combining them together leads to the best overall results.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


