{"title":"资源受限的人启发机器人视觉的空间变型和主动视觉机制综述","authors":"Rui Pimentel de Figueiredo, Alexandre Bernardino","doi":"10.1007/s10514-023-10107-7","DOIUrl":null,"url":null,"abstract":"<div><p>In order to explore and understand the surrounding environment in an efficient manner, humans have developed a set of space-variant vision mechanisms that allow them to actively attend different locations in the surrounding environment and compensate for memory, neuronal transmission bandwidth and computational limitations in the brain. Similarly, humanoid robots deployed in everyday environments have limited on-board resources, and are faced with increasingly complex tasks that require interaction with objects arranged in many possible spatial configurations. The main goal of this work is to describe and overview biologically inspired, space-variant human visual mechanism benefits, when combined with state-of-the-art algorithms for different visual tasks (e.g. object detection), ranging from low-level hardwired attention vision (i.e. foveal vision) to high-level visual attention mechanisms. We overview the state-of-the-art in biologically plausible space-variant resource-constrained vision architectures, namely for active recognition and localization tasks.</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 8","pages":"1119 - 1135"},"PeriodicalIF":3.7000,"publicationDate":"2023-06-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10514-023-10107-7.pdf","citationCount":"0","resultStr":"{\"title\":\"An overview of space-variant and active vision mechanisms for resource-constrained human inspired robotic vision\",\"authors\":\"Rui Pimentel de Figueiredo, Alexandre Bernardino\",\"doi\":\"10.1007/s10514-023-10107-7\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>In order to explore and understand the surrounding environment in an efficient manner, humans have developed a set of space-variant vision mechanisms that allow them to actively attend different locations in the surrounding environment and compensate for memory, neuronal transmission bandwidth and computational limitations in the brain. Similarly, humanoid robots deployed in everyday environments have limited on-board resources, and are faced with increasingly complex tasks that require interaction with objects arranged in many possible spatial configurations. The main goal of this work is to describe and overview biologically inspired, space-variant human visual mechanism benefits, when combined with state-of-the-art algorithms for different visual tasks (e.g. object detection), ranging from low-level hardwired attention vision (i.e. foveal vision) to high-level visual attention mechanisms. We overview the state-of-the-art in biologically plausible space-variant resource-constrained vision architectures, namely for active recognition and localization tasks.</p></div>\",\"PeriodicalId\":55409,\"journal\":{\"name\":\"Autonomous Robots\",\"volume\":\"47 8\",\"pages\":\"1119 - 1135\"},\"PeriodicalIF\":3.7000,\"publicationDate\":\"2023-06-09\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://link.springer.com/content/pdf/10.1007/s10514-023-10107-7.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Robots\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10514-023-10107-7\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10107-7","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
An overview of space-variant and active vision mechanisms for resource-constrained human inspired robotic vision
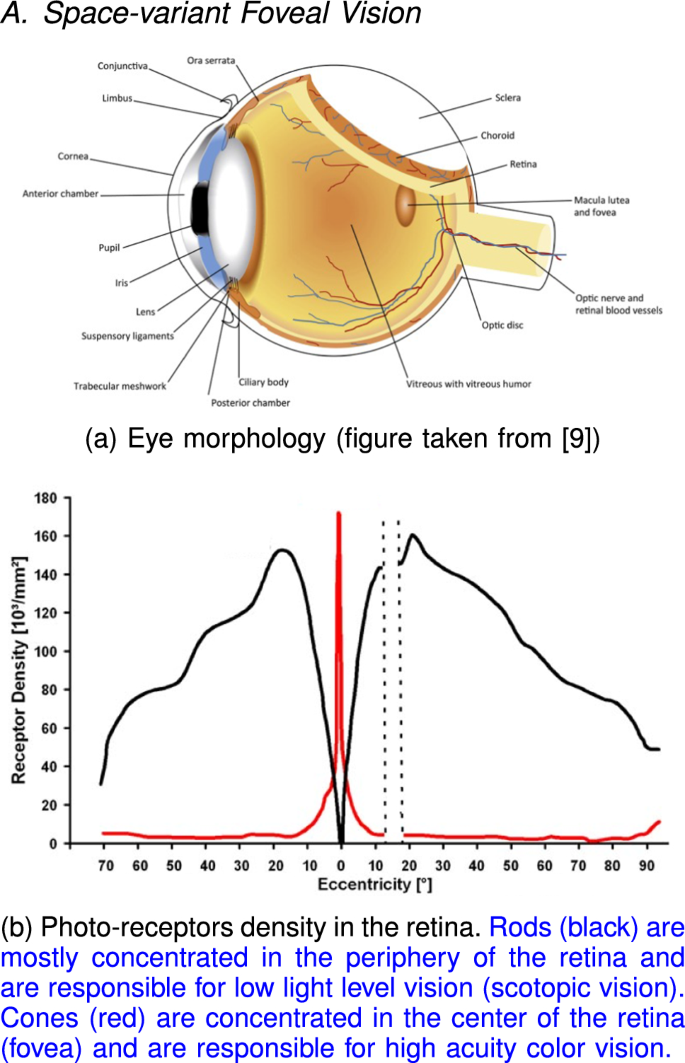
In order to explore and understand the surrounding environment in an efficient manner, humans have developed a set of space-variant vision mechanisms that allow them to actively attend different locations in the surrounding environment and compensate for memory, neuronal transmission bandwidth and computational limitations in the brain. Similarly, humanoid robots deployed in everyday environments have limited on-board resources, and are faced with increasingly complex tasks that require interaction with objects arranged in many possible spatial configurations. The main goal of this work is to describe and overview biologically inspired, space-variant human visual mechanism benefits, when combined with state-of-the-art algorithms for different visual tasks (e.g. object detection), ranging from low-level hardwired attention vision (i.e. foveal vision) to high-level visual attention mechanisms. We overview the state-of-the-art in biologically plausible space-variant resource-constrained vision architectures, namely for active recognition and localization tasks.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


