Pouria Razzaghi, Ehab Al Khatib, Yildirim Hurmuzlu
{"title":"磁驱动微型机器人的自动群运动控制","authors":"Pouria Razzaghi, Ehab Al Khatib, Yildirim Hurmuzlu","doi":"10.1007/s10514-023-10084-x","DOIUrl":null,"url":null,"abstract":"<div><p>Small-size robots offer access to spaces that are inaccessible to larger ones. This type of access is crucial in applications such as drug delivery, environmental detection, and collection of small samples. However, there are some tasks that are not possible to perform using only one robot including assembly and manufacturing at small scales, manipulation of micro- and nano- objects, and robot-based structuring of small-scale materials. In this article, we focus on tasks that can be achieved using a group of small-scale robots like pattern formation. These robots are typically externally actuated due to their size limitation. Yet, one faces the challenge of controlling a group of robots using a single global input. In this study, we propose a control algorithm to position individual members of a group in predefined positions. In our previous work, we presented a small-scaled magnetically actuated millirobot. An electromagnetic coil system applied external force and steered the millirobots in various modes of motion such as pivot walking and tumbling. In this paper, we propose two new designs of these millirobots. In the first design, the magnets are placed at the center of body to reduce the magnetic attraction force between the millirobots. In the second design, the millirobots are of identical length with two extra legs acting as the pivot points and varying pivot separation in design to take advantage of variable speed in pivot walking mode while keeping the speed constant in tumbling mode. This paper presents an algorithm for positional control of <i>n</i> millirobots with different lengths to move them from given initial positions to final desired ones. This method is based on choosing a leader that is fully controllable. Then, the motions of other millirobots are regulated by following the leader and determining their appropriate pivot separations in order to implement the intended group motion. Simulations and hardware experiments validate these results.</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 7","pages":"865 - 877"},"PeriodicalIF":3.7000,"publicationDate":"2023-02-25","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10514-023-10084-x.pdf","citationCount":"1","resultStr":"{\"title\":\"Automated group motion control of magnetically actuated millirobots\",\"authors\":\"Pouria Razzaghi, Ehab Al Khatib, Yildirim Hurmuzlu\",\"doi\":\"10.1007/s10514-023-10084-x\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Small-size robots offer access to spaces that are inaccessible to larger ones. This type of access is crucial in applications such as drug delivery, environmental detection, and collection of small samples. However, there are some tasks that are not possible to perform using only one robot including assembly and manufacturing at small scales, manipulation of micro- and nano- objects, and robot-based structuring of small-scale materials. In this article, we focus on tasks that can be achieved using a group of small-scale robots like pattern formation. These robots are typically externally actuated due to their size limitation. Yet, one faces the challenge of controlling a group of robots using a single global input. In this study, we propose a control algorithm to position individual members of a group in predefined positions. In our previous work, we presented a small-scaled magnetically actuated millirobot. An electromagnetic coil system applied external force and steered the millirobots in various modes of motion such as pivot walking and tumbling. In this paper, we propose two new designs of these millirobots. In the first design, the magnets are placed at the center of body to reduce the magnetic attraction force between the millirobots. In the second design, the millirobots are of identical length with two extra legs acting as the pivot points and varying pivot separation in design to take advantage of variable speed in pivot walking mode while keeping the speed constant in tumbling mode. This paper presents an algorithm for positional control of <i>n</i> millirobots with different lengths to move them from given initial positions to final desired ones. This method is based on choosing a leader that is fully controllable. Then, the motions of other millirobots are regulated by following the leader and determining their appropriate pivot separations in order to implement the intended group motion. Simulations and hardware experiments validate these results.</p></div>\",\"PeriodicalId\":55409,\"journal\":{\"name\":\"Autonomous Robots\",\"volume\":\"47 7\",\"pages\":\"865 - 877\"},\"PeriodicalIF\":3.7000,\"publicationDate\":\"2023-02-25\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://link.springer.com/content/pdf/10.1007/s10514-023-10084-x.pdf\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Robots\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10514-023-10084-x\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10084-x","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Automated group motion control of magnetically actuated millirobots
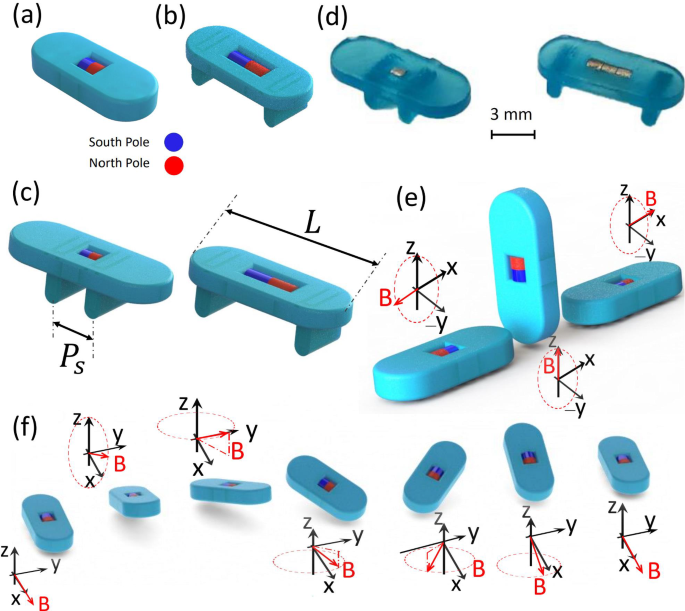
Small-size robots offer access to spaces that are inaccessible to larger ones. This type of access is crucial in applications such as drug delivery, environmental detection, and collection of small samples. However, there are some tasks that are not possible to perform using only one robot including assembly and manufacturing at small scales, manipulation of micro- and nano- objects, and robot-based structuring of small-scale materials. In this article, we focus on tasks that can be achieved using a group of small-scale robots like pattern formation. These robots are typically externally actuated due to their size limitation. Yet, one faces the challenge of controlling a group of robots using a single global input. In this study, we propose a control algorithm to position individual members of a group in predefined positions. In our previous work, we presented a small-scaled magnetically actuated millirobot. An electromagnetic coil system applied external force and steered the millirobots in various modes of motion such as pivot walking and tumbling. In this paper, we propose two new designs of these millirobots. In the first design, the magnets are placed at the center of body to reduce the magnetic attraction force between the millirobots. In the second design, the millirobots are of identical length with two extra legs acting as the pivot points and varying pivot separation in design to take advantage of variable speed in pivot walking mode while keeping the speed constant in tumbling mode. This paper presents an algorithm for positional control of n millirobots with different lengths to move them from given initial positions to final desired ones. This method is based on choosing a leader that is fully controllable. Then, the motions of other millirobots are regulated by following the leader and determining their appropriate pivot separations in order to implement the intended group motion. Simulations and hardware experiments validate these results.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


