{"title":"基于逆动力学方法的五自由度划船运动模型建模与鲁棒控制","authors":"Amin Aref Adib, Seyyed Arash Haghpanah","doi":"10.31661/jbpe.v0i0.2011-1230","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>Competitive sailing requires efforts pertinent to physiological limitations and coordination between different parts of the body. Such coordination depends on the torques applied by muscles to the joints.</p><p><strong>Objective: </strong>This study aims to simulate the motion and provide a control law for the joint torques in order to track the desired motion paths.</p><p><strong>Material and methods: </strong>In this analytical study, an inverse dynamics based control is employed in order to simulate the motion by tracking the desired movement trajectories. First, the dynamics equations are obtained using Lagrange method for 5 degrees of freedom (5 DOF) model. In the following, a robust control scheme with inverse dynamics method based on the Proportional-Integral-Derivative (PID) approach is employed to track the desired joint angles obtained from the experiment.</p><p><strong>Results: </strong>The simulation results demonstrate the performance of the proposed control method. Low settling times are achieved for the entire joint, which is appropriate in comparison with the time period of each cycle (3.75 s). Also, the maximum torques required to be applied to the joints are in physiological range.</p><p><strong>Conclusion: </strong>This study provided an appropriate model for the analysis of human movement in rowing sport. The model can also be cited in terms of basic biological theories in addition to practical computational uses in biomechanical engineering. Accordingly, the generated control signals can help to improve the interactive body movements during paddling and in designing robotic arms for automatic rowing.</p>","PeriodicalId":38035,"journal":{"name":"Journal of Biomedical Physics and Engineering","volume":" ","pages":"453-462"},"PeriodicalIF":0.0000,"publicationDate":"2023-10-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/af/fc/JBPE-13-453.PMC10589694.pdf","citationCount":"0","resultStr":"{\"title\":\"Modeling and Robust Control of a 5 DOF Model for Rowing Motion by Inverse Dynamics Method.\",\"authors\":\"Amin Aref Adib, Seyyed Arash Haghpanah\",\"doi\":\"10.31661/jbpe.v0i0.2011-1230\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Background: </strong>Competitive sailing requires efforts pertinent to physiological limitations and coordination between different parts of the body. Such coordination depends on the torques applied by muscles to the joints.</p><p><strong>Objective: </strong>This study aims to simulate the motion and provide a control law for the joint torques in order to track the desired motion paths.</p><p><strong>Material and methods: </strong>In this analytical study, an inverse dynamics based control is employed in order to simulate the motion by tracking the desired movement trajectories. First, the dynamics equations are obtained using Lagrange method for 5 degrees of freedom (5 DOF) model. In the following, a robust control scheme with inverse dynamics method based on the Proportional-Integral-Derivative (PID) approach is employed to track the desired joint angles obtained from the experiment.</p><p><strong>Results: </strong>The simulation results demonstrate the performance of the proposed control method. Low settling times are achieved for the entire joint, which is appropriate in comparison with the time period of each cycle (3.75 s). Also, the maximum torques required to be applied to the joints are in physiological range.</p><p><strong>Conclusion: </strong>This study provided an appropriate model for the analysis of human movement in rowing sport. The model can also be cited in terms of basic biological theories in addition to practical computational uses in biomechanical engineering. Accordingly, the generated control signals can help to improve the interactive body movements during paddling and in designing robotic arms for automatic rowing.</p>\",\"PeriodicalId\":38035,\"journal\":{\"name\":\"Journal of Biomedical Physics and Engineering\",\"volume\":\" \",\"pages\":\"453-462\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2023-10-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/af/fc/JBPE-13-453.PMC10589694.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Biomedical Physics and Engineering\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.31661/jbpe.v0i0.2011-1230\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"Medicine\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Biomedical Physics and Engineering","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.31661/jbpe.v0i0.2011-1230","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"Medicine","Score":null,"Total":0}
Modeling and Robust Control of a 5 DOF Model for Rowing Motion by Inverse Dynamics Method.
Background: Competitive sailing requires efforts pertinent to physiological limitations and coordination between different parts of the body. Such coordination depends on the torques applied by muscles to the joints.
Objective: This study aims to simulate the motion and provide a control law for the joint torques in order to track the desired motion paths.
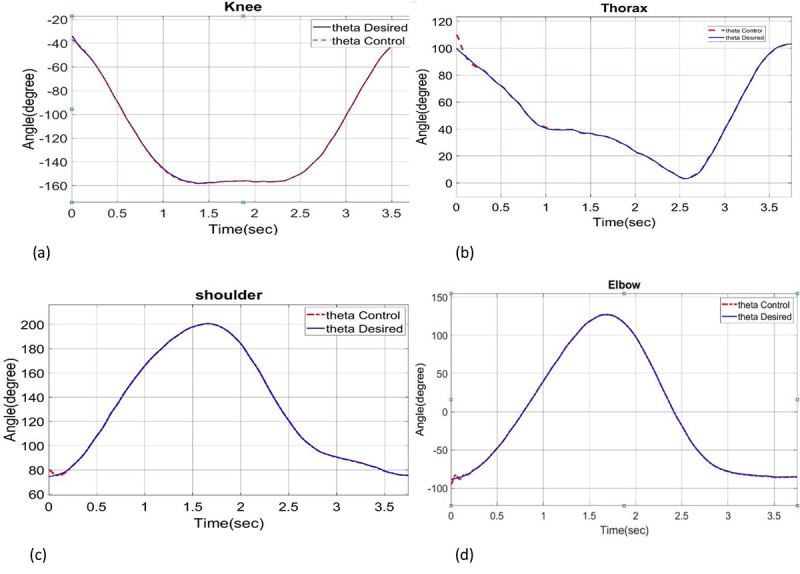
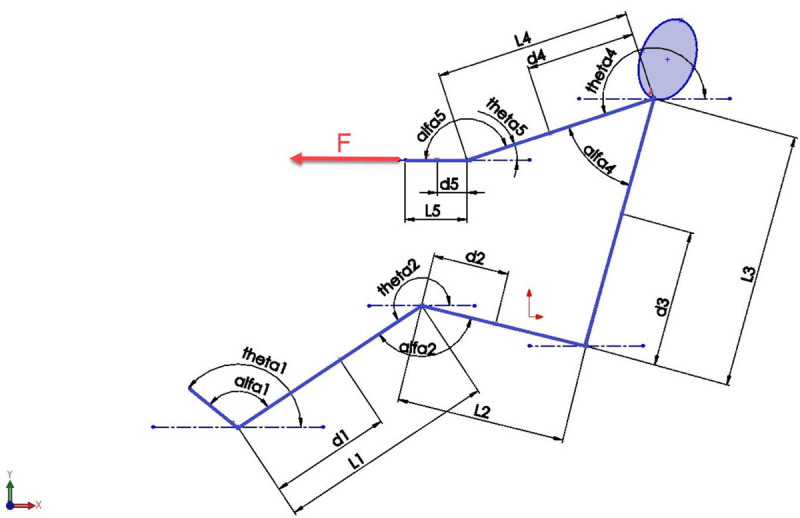
Material and methods: In this analytical study, an inverse dynamics based control is employed in order to simulate the motion by tracking the desired movement trajectories. First, the dynamics equations are obtained using Lagrange method for 5 degrees of freedom (5 DOF) model. In the following, a robust control scheme with inverse dynamics method based on the Proportional-Integral-Derivative (PID) approach is employed to track the desired joint angles obtained from the experiment.
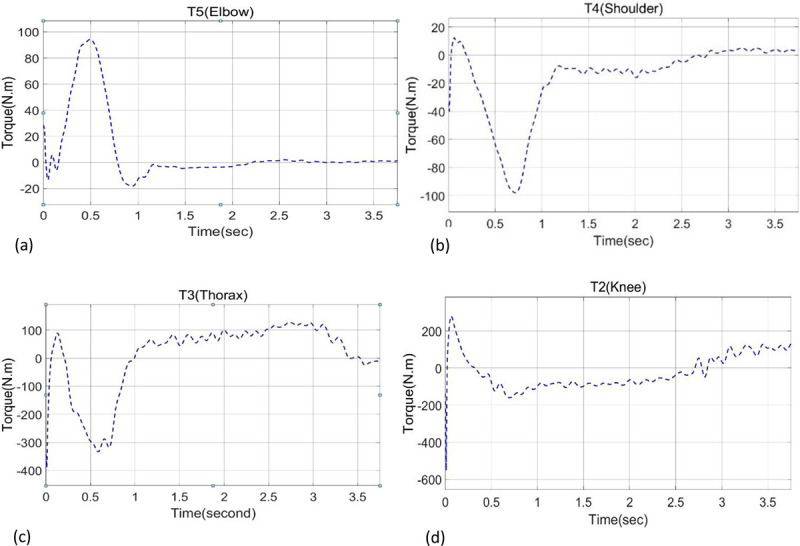
Results: The simulation results demonstrate the performance of the proposed control method. Low settling times are achieved for the entire joint, which is appropriate in comparison with the time period of each cycle (3.75 s). Also, the maximum torques required to be applied to the joints are in physiological range.
Conclusion: This study provided an appropriate model for the analysis of human movement in rowing sport. The model can also be cited in terms of basic biological theories in addition to practical computational uses in biomechanical engineering. Accordingly, the generated control signals can help to improve the interactive body movements during paddling and in designing robotic arms for automatic rowing.
期刊介绍:
The Journal of Biomedical Physics and Engineering (JBPE) is a bimonthly peer-reviewed English-language journal that publishes high-quality basic sciences and clinical research (experimental or theoretical) broadly concerned with the relationship of physics to medicine and engineering.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


