Meltem Kurt Pehlivanoğlu, Eren Cem Ay, Ayşe Gül Eker, Nur Banu Albayrak, Nevcihan Duru, Ahmet Serdar Mutluer, Tolga Turan Dündar, İhsan Doğan
{"title":"一种新的神经外科手术路径规划框架。","authors":"Meltem Kurt Pehlivanoğlu, Eren Cem Ay, Ayşe Gül Eker, Nur Banu Albayrak, Nevcihan Duru, Ahmet Serdar Mutluer, Tolga Turan Dündar, İhsan Doğan","doi":"10.1002/rcs.2576","DOIUrl":null,"url":null,"abstract":"<div>\n \n \n <section>\n \n <h3> Background</h3>\n \n <p>Despite using a variety of path-finding algorithms that use tracts, the most significant advancement in this study is considering the values of all brain areas by doing atlas-based segmentation for a more precise search. Our motivation comes from the literature’s shortcomings in designing and implementing path-planning methods. Since planning paths with curvatures is a complex problem that requires considering many surgical and physiological constraints, most path-planning strategies focus on straight paths. There is also a lack of studies that focus on the complete structure of the brain with the tracks, veins, and segmented areas. Instrument dependence is another inadequacy of the methods proposed in the literature.</p>\n </section>\n \n <section>\n \n <h3> Aims</h3>\n \n <p>The aim of this study is to design a new surgical path planning framework that helps to plan the surgical path independently of the instrument, considers the entire structure of the brain, and allows curvilinear surgical paths. Thus, neurosurgeons can generate patient-specific possible optimal surgical pathways before the neurosurgical procedure.</p>\n </section>\n \n <section>\n \n <h3> Materials & Methods</h3>\n \n <p>The proposed framework includes different path-finding algorithms (Dijkstra, A*, and their aggressive variants) that find optimal paths by taking the risk scores (surgeons assessed all the segmented regions, considering the extent of damage. In this evaluation, scores ranged from “0 to 10,” with the most critical areas receiving a score of “10,” while the least possible affected areas were assigned a score of \"0\") for sensitive brain areas into consideration. For the tract image processing the framework includes fractional anisotropy (FA), relative anisotropy (RA), spherical measure (SM), and linear measure (LM) methods.</p>\n </section>\n \n <section>\n \n <h3> Results</h3>\n \n <p>This is the first paper to handle tracts and atlas-based segmentation of the human brain altogether under a framework for surgical path planning. The framework has a dynamic structure that gives the flexibility to add different path-finding algorithms and generate different widths of surgical pathways. Moreover, surgeons can update the score table to guarantee minimally invasive surgery. The output file format of all the extracted surgical paths is NRRD, so it can be easily visualised, analysed, or processed over the third part software tools.</p>\n </section>\n \n <section>\n \n <h3> Discussion</h3>\n \n <p>In this study, we generated many possible surgical pathways then these pathways were evaluated by the surgeons the results were impressive because the framework could identify surgical pathways used in real-world surgery that correspond to the standard pathways such as anterior transsylvian, trans sulcal, transgyral, and sub-temporal.</p>\n </section>\n \n <section>\n \n <h3> Conclusion</h3>\n \n <p>This study proposes a new surgical path planning framework for neurosurgery. Moreover, in the future by adding/adopting different parameters (such as operation time, and short and long-term complications after surgery) to the proposed framework, it would be possible to find new surgical pathways for difficult surgical conditions.</p>\n </section>\n </div>","PeriodicalId":50311,"journal":{"name":"International Journal of Medical Robotics and Computer Assisted Surgery","volume":"20 1","pages":""},"PeriodicalIF":2.3000,"publicationDate":"2023-09-29","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.2576","citationCount":"0","resultStr":"{\"title\":\"A new surgical path planning framework for neurosurgery\",\"authors\":\"Meltem Kurt Pehlivanoğlu, Eren Cem Ay, Ayşe Gül Eker, Nur Banu Albayrak, Nevcihan Duru, Ahmet Serdar Mutluer, Tolga Turan Dündar, İhsan Doğan\",\"doi\":\"10.1002/rcs.2576\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div>\\n \\n \\n <section>\\n \\n <h3> Background</h3>\\n \\n <p>Despite using a variety of path-finding algorithms that use tracts, the most significant advancement in this study is considering the values of all brain areas by doing atlas-based segmentation for a more precise search. Our motivation comes from the literature’s shortcomings in designing and implementing path-planning methods. Since planning paths with curvatures is a complex problem that requires considering many surgical and physiological constraints, most path-planning strategies focus on straight paths. There is also a lack of studies that focus on the complete structure of the brain with the tracks, veins, and segmented areas. Instrument dependence is another inadequacy of the methods proposed in the literature.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Aims</h3>\\n \\n <p>The aim of this study is to design a new surgical path planning framework that helps to plan the surgical path independently of the instrument, considers the entire structure of the brain, and allows curvilinear surgical paths. Thus, neurosurgeons can generate patient-specific possible optimal surgical pathways before the neurosurgical procedure.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Materials & Methods</h3>\\n \\n <p>The proposed framework includes different path-finding algorithms (Dijkstra, A*, and their aggressive variants) that find optimal paths by taking the risk scores (surgeons assessed all the segmented regions, considering the extent of damage. In this evaluation, scores ranged from “0 to 10,” with the most critical areas receiving a score of “10,” while the least possible affected areas were assigned a score of \\\"0\\\") for sensitive brain areas into consideration. For the tract image processing the framework includes fractional anisotropy (FA), relative anisotropy (RA), spherical measure (SM), and linear measure (LM) methods.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Results</h3>\\n \\n <p>This is the first paper to handle tracts and atlas-based segmentation of the human brain altogether under a framework for surgical path planning. The framework has a dynamic structure that gives the flexibility to add different path-finding algorithms and generate different widths of surgical pathways. Moreover, surgeons can update the score table to guarantee minimally invasive surgery. The output file format of all the extracted surgical paths is NRRD, so it can be easily visualised, analysed, or processed over the third part software tools.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Discussion</h3>\\n \\n <p>In this study, we generated many possible surgical pathways then these pathways were evaluated by the surgeons the results were impressive because the framework could identify surgical pathways used in real-world surgery that correspond to the standard pathways such as anterior transsylvian, trans sulcal, transgyral, and sub-temporal.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Conclusion</h3>\\n \\n <p>This study proposes a new surgical path planning framework for neurosurgery. Moreover, in the future by adding/adopting different parameters (such as operation time, and short and long-term complications after surgery) to the proposed framework, it would be possible to find new surgical pathways for difficult surgical conditions.</p>\\n </section>\\n </div>\",\"PeriodicalId\":50311,\"journal\":{\"name\":\"International Journal of Medical Robotics and Computer Assisted Surgery\",\"volume\":\"20 1\",\"pages\":\"\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2023-09-29\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.2576\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Medical Robotics and Computer Assisted Surgery\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/rcs.2576\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"SURGERY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Medical Robotics and Computer Assisted Surgery","FirstCategoryId":"3","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rcs.2576","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"SURGERY","Score":null,"Total":0}
A new surgical path planning framework for neurosurgery
Background
Despite using a variety of path-finding algorithms that use tracts, the most significant advancement in this study is considering the values of all brain areas by doing atlas-based segmentation for a more precise search. Our motivation comes from the literature’s shortcomings in designing and implementing path-planning methods. Since planning paths with curvatures is a complex problem that requires considering many surgical and physiological constraints, most path-planning strategies focus on straight paths. There is also a lack of studies that focus on the complete structure of the brain with the tracks, veins, and segmented areas. Instrument dependence is another inadequacy of the methods proposed in the literature.
Aims
The aim of this study is to design a new surgical path planning framework that helps to plan the surgical path independently of the instrument, considers the entire structure of the brain, and allows curvilinear surgical paths. Thus, neurosurgeons can generate patient-specific possible optimal surgical pathways before the neurosurgical procedure.
Materials & Methods
The proposed framework includes different path-finding algorithms (Dijkstra, A*, and their aggressive variants) that find optimal paths by taking the risk scores (surgeons assessed all the segmented regions, considering the extent of damage. In this evaluation, scores ranged from “0 to 10,” with the most critical areas receiving a score of “10,” while the least possible affected areas were assigned a score of "0") for sensitive brain areas into consideration. For the tract image processing the framework includes fractional anisotropy (FA), relative anisotropy (RA), spherical measure (SM), and linear measure (LM) methods.
Results
This is the first paper to handle tracts and atlas-based segmentation of the human brain altogether under a framework for surgical path planning. The framework has a dynamic structure that gives the flexibility to add different path-finding algorithms and generate different widths of surgical pathways. Moreover, surgeons can update the score table to guarantee minimally invasive surgery. The output file format of all the extracted surgical paths is NRRD, so it can be easily visualised, analysed, or processed over the third part software tools.
Discussion
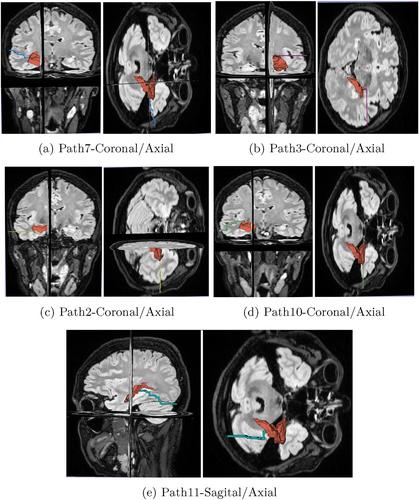
In this study, we generated many possible surgical pathways then these pathways were evaluated by the surgeons the results were impressive because the framework could identify surgical pathways used in real-world surgery that correspond to the standard pathways such as anterior transsylvian, trans sulcal, transgyral, and sub-temporal.
Conclusion
This study proposes a new surgical path planning framework for neurosurgery. Moreover, in the future by adding/adopting different parameters (such as operation time, and short and long-term complications after surgery) to the proposed framework, it would be possible to find new surgical pathways for difficult surgical conditions.
期刊介绍:
The International Journal of Medical Robotics and Computer Assisted Surgery provides a cross-disciplinary platform for presenting the latest developments in robotics and computer assisted technologies for medical applications. The journal publishes cutting-edge papers and expert reviews, complemented by commentaries, correspondence and conference highlights that stimulate discussion and exchange of ideas. Areas of interest include robotic surgery aids and systems, operative planning tools, medical imaging and visualisation, simulation and navigation, virtual reality, intuitive command and control systems, haptics and sensor technologies. In addition to research and surgical planning studies, the journal welcomes papers detailing clinical trials and applications of computer-assisted workflows and robotic systems in neurosurgery, urology, paediatric, orthopaedic, craniofacial, cardiovascular, thoraco-abdominal, musculoskeletal and visceral surgery. Articles providing critical analysis of clinical trials, assessment of the benefits and risks of the application of these technologies, commenting on ease of use, or addressing surgical education and training issues are also encouraged. The journal aims to foster a community that encompasses medical practitioners, researchers, and engineers and computer scientists developing robotic systems and computational tools in academic and commercial environments, with the intention of promoting and developing these exciting areas of medical technology.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


