Elio Hajj Assaf, Cornelius von Einem, Cesar Cadena, Roland Siegwart, Florian Tschopp
{"title":"高精度、低成本的铁路远程障碍物检测万向节平台。","authors":"Elio Hajj Assaf, Cornelius von Einem, Cesar Cadena, Roland Siegwart, Florian Tschopp","doi":"10.3390/s22020474","DOIUrl":null,"url":null,"abstract":"<p><p>Increasing demand for rail transportation results in denser and more high-speed usage of the existing railway network, making new and more advanced vehicle safety systems necessary. Furthermore, high traveling speeds and the large weights of trains lead to long braking distances-all of which necessitates a Long-Range Obstacle Detection (LROD) system, capable of detecting humans and other objects more than 1000 m in advance. According to current research, only a few sensor modalities are capable of reaching this far and recording sufficiently accurate data to distinguish individual objects. The limitation of these sensors, such as a 1D-Light Detection and Ranging (LiDAR), is however a very narrow Field of View (FoV), making it necessary to use high-precision means of orienting to target them at possible areas of interest. To close this research gap, this paper presents a high-precision pointing mechanism, for the use in a future novel railway obstacle detection system, capable of targeting a 1D-LiDAR at humans or objects at the required distance. This approach addresses the challenges of a low target price, restricted access to high-precision machinery and equipment as well as unique requirements of our target application. By combining established elements from 3D printers and Computer Numerical Control (CNC) machines with a double-hinged lever system, simple and low-cost components are capable of precisely orienting an arbitrary sensor platform. The system's actual pointing accuracy has been evaluated using a controlled, in-door, long-range experiment. The device was able to demonstrate a precision of 6.179 mdeg, which is at the limit of the measurable precision of the designed experiment.</p>","PeriodicalId":3,"journal":{"name":"ACS Applied Electronic Materials","volume":" ","pages":""},"PeriodicalIF":4.3000,"publicationDate":"2022-01-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC8781877/pdf/","citationCount":"3","resultStr":"{\"title\":\"High-Precision Low-Cost Gimballing Platform for Long-Range Railway Obstacle Detection.\",\"authors\":\"Elio Hajj Assaf, Cornelius von Einem, Cesar Cadena, Roland Siegwart, Florian Tschopp\",\"doi\":\"10.3390/s22020474\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Increasing demand for rail transportation results in denser and more high-speed usage of the existing railway network, making new and more advanced vehicle safety systems necessary. Furthermore, high traveling speeds and the large weights of trains lead to long braking distances-all of which necessitates a Long-Range Obstacle Detection (LROD) system, capable of detecting humans and other objects more than 1000 m in advance. According to current research, only a few sensor modalities are capable of reaching this far and recording sufficiently accurate data to distinguish individual objects. The limitation of these sensors, such as a 1D-Light Detection and Ranging (LiDAR), is however a very narrow Field of View (FoV), making it necessary to use high-precision means of orienting to target them at possible areas of interest. To close this research gap, this paper presents a high-precision pointing mechanism, for the use in a future novel railway obstacle detection system, capable of targeting a 1D-LiDAR at humans or objects at the required distance. This approach addresses the challenges of a low target price, restricted access to high-precision machinery and equipment as well as unique requirements of our target application. By combining established elements from 3D printers and Computer Numerical Control (CNC) machines with a double-hinged lever system, simple and low-cost components are capable of precisely orienting an arbitrary sensor platform. The system's actual pointing accuracy has been evaluated using a controlled, in-door, long-range experiment. The device was able to demonstrate a precision of 6.179 mdeg, which is at the limit of the measurable precision of the designed experiment.</p>\",\"PeriodicalId\":3,\"journal\":{\"name\":\"ACS Applied Electronic Materials\",\"volume\":\" \",\"pages\":\"\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2022-01-09\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC8781877/pdf/\",\"citationCount\":\"3\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"ACS Applied Electronic Materials\",\"FirstCategoryId\":\"103\",\"ListUrlMain\":\"https://doi.org/10.3390/s22020474\",\"RegionNum\":3,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"ACS Applied Electronic Materials","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.3390/s22020474","RegionNum":3,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
High-Precision Low-Cost Gimballing Platform for Long-Range Railway Obstacle Detection.
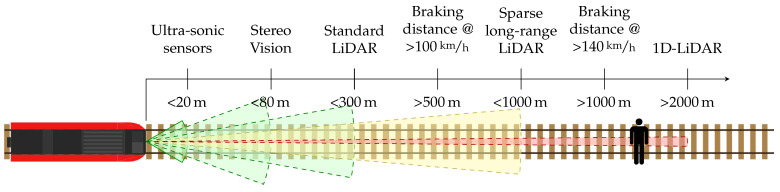
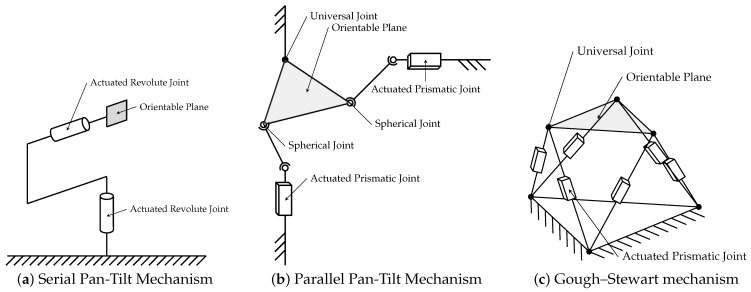
Increasing demand for rail transportation results in denser and more high-speed usage of the existing railway network, making new and more advanced vehicle safety systems necessary. Furthermore, high traveling speeds and the large weights of trains lead to long braking distances-all of which necessitates a Long-Range Obstacle Detection (LROD) system, capable of detecting humans and other objects more than 1000 m in advance. According to current research, only a few sensor modalities are capable of reaching this far and recording sufficiently accurate data to distinguish individual objects. The limitation of these sensors, such as a 1D-Light Detection and Ranging (LiDAR), is however a very narrow Field of View (FoV), making it necessary to use high-precision means of orienting to target them at possible areas of interest. To close this research gap, this paper presents a high-precision pointing mechanism, for the use in a future novel railway obstacle detection system, capable of targeting a 1D-LiDAR at humans or objects at the required distance. This approach addresses the challenges of a low target price, restricted access to high-precision machinery and equipment as well as unique requirements of our target application. By combining established elements from 3D printers and Computer Numerical Control (CNC) machines with a double-hinged lever system, simple and low-cost components are capable of precisely orienting an arbitrary sensor platform. The system's actual pointing accuracy has been evaluated using a controlled, in-door, long-range experiment. The device was able to demonstrate a precision of 6.179 mdeg, which is at the limit of the measurable precision of the designed experiment.
期刊介绍:
ACS Applied Electronic Materials is an interdisciplinary journal publishing original research covering all aspects of electronic materials. The journal is devoted to reports of new and original experimental and theoretical research of an applied nature that integrate knowledge in the areas of materials science, engineering, optics, physics, and chemistry into important applications of electronic materials. Sample research topics that span the journal's scope are inorganic, organic, ionic and polymeric materials with properties that include conducting, semiconducting, superconducting, insulating, dielectric, magnetic, optoelectronic, piezoelectric, ferroelectric and thermoelectric.
Indexed/Abstracted:
Web of Science SCIE
Scopus
CAS
INSPEC
Portico

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


