{"title":"设计,倒置大桶光聚合3D打印,以及用于局部体内组织测量的微型力传感器的初始表征。","authors":"Shashank S Kumat, Panos S Shiakolas","doi":"10.1186/s41205-021-00128-2","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>Tissue healthiness could be assessed by evaluating its viscoelastic properties through localized contact reaction force measurements to obtain quantitative time history information. To evaluate these properties for hard to reach and confined areas of the human body, miniature force sensors with size constraints and appropriate load capabilities are needed. This research article reports on the design, fabrication, integration, characterization, and in vivo experimentation of a uniaxial miniature force sensor on a human forearm.</p><p><strong>Methods: </strong>The strain gauge based sensor components were designed to meet dimensional constraints (diameter ≤3.5mm), safety factor (≥3) and performance specifications (maximum applied load, resolution, sensitivity, and accuracy). The sensing element was fabricated using traditional machining. Inverted vat photopolymerization technology was used to prototype complex components on a Form3 printer; micro-component orientation for fabrication challenges were overcome through experimentation. The sensor performance was characterized using dead weights and a LabVIEW based custom developed data acquisition system. The operational performance was evaluated by in vivo measurements on a human forearm; the relaxation data were used to calculate the Voigt model viscoelastic coefficient.</p><p><strong>Results: </strong>The three dimensional (3D) printed components exhibited good dimensional accuracy (maximum deviation of 183μm). The assembled sensor exhibited linear behavior (regression coefficient of R<sup>2</sup>=0.999) and met desired performance specifications of 3.4 safety factor, 1.2N load capacity, 18mN resolution, and 3.13% accuracy. The in vivo experimentally obtained relaxation data were analyzed using the Voigt model yielding a viscoelastic coefficient τ=12.38sec and a curve-fit regression coefficient of R<sup>2</sup>=0.992.</p><p><strong>Conclusions: </strong>This research presented the successful design, use of 3D printing for component fabrication, integration, characterization, and analysis of initial in vivo collected measurements with excellent performance for a miniature force sensor for the assessment of tissue viscoelastic properties. Through this research certain limitations were identified, however the initial sensor performance was promising and encouraging to continue the work to improve the sensor. This micro-force sensor could be used to obtain tissue quantitative data to assess tissue healthiness for medical care over extended time periods.</p>","PeriodicalId":3,"journal":{"name":"ACS Applied Electronic Materials","volume":" ","pages":"1"},"PeriodicalIF":4.3000,"publicationDate":"2022-01-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC8725558/pdf/","citationCount":"2","resultStr":"{\"title\":\"Design, inverted vat photopolymerization 3D printing, and initial characterization of a miniature force sensor for localized in vivo tissue measurements.\",\"authors\":\"Shashank S Kumat, Panos S Shiakolas\",\"doi\":\"10.1186/s41205-021-00128-2\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Background: </strong>Tissue healthiness could be assessed by evaluating its viscoelastic properties through localized contact reaction force measurements to obtain quantitative time history information. To evaluate these properties for hard to reach and confined areas of the human body, miniature force sensors with size constraints and appropriate load capabilities are needed. This research article reports on the design, fabrication, integration, characterization, and in vivo experimentation of a uniaxial miniature force sensor on a human forearm.</p><p><strong>Methods: </strong>The strain gauge based sensor components were designed to meet dimensional constraints (diameter ≤3.5mm), safety factor (≥3) and performance specifications (maximum applied load, resolution, sensitivity, and accuracy). The sensing element was fabricated using traditional machining. Inverted vat photopolymerization technology was used to prototype complex components on a Form3 printer; micro-component orientation for fabrication challenges were overcome through experimentation. The sensor performance was characterized using dead weights and a LabVIEW based custom developed data acquisition system. The operational performance was evaluated by in vivo measurements on a human forearm; the relaxation data were used to calculate the Voigt model viscoelastic coefficient.</p><p><strong>Results: </strong>The three dimensional (3D) printed components exhibited good dimensional accuracy (maximum deviation of 183μm). The assembled sensor exhibited linear behavior (regression coefficient of R<sup>2</sup>=0.999) and met desired performance specifications of 3.4 safety factor, 1.2N load capacity, 18mN resolution, and 3.13% accuracy. The in vivo experimentally obtained relaxation data were analyzed using the Voigt model yielding a viscoelastic coefficient τ=12.38sec and a curve-fit regression coefficient of R<sup>2</sup>=0.992.</p><p><strong>Conclusions: </strong>This research presented the successful design, use of 3D printing for component fabrication, integration, characterization, and analysis of initial in vivo collected measurements with excellent performance for a miniature force sensor for the assessment of tissue viscoelastic properties. Through this research certain limitations were identified, however the initial sensor performance was promising and encouraging to continue the work to improve the sensor. This micro-force sensor could be used to obtain tissue quantitative data to assess tissue healthiness for medical care over extended time periods.</p>\",\"PeriodicalId\":3,\"journal\":{\"name\":\"ACS Applied Electronic Materials\",\"volume\":\" \",\"pages\":\"1\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2022-01-04\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC8725558/pdf/\",\"citationCount\":\"2\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"ACS Applied Electronic Materials\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1186/s41205-021-00128-2\",\"RegionNum\":3,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"ACS Applied Electronic Materials","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1186/s41205-021-00128-2","RegionNum":3,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Design, inverted vat photopolymerization 3D printing, and initial characterization of a miniature force sensor for localized in vivo tissue measurements.
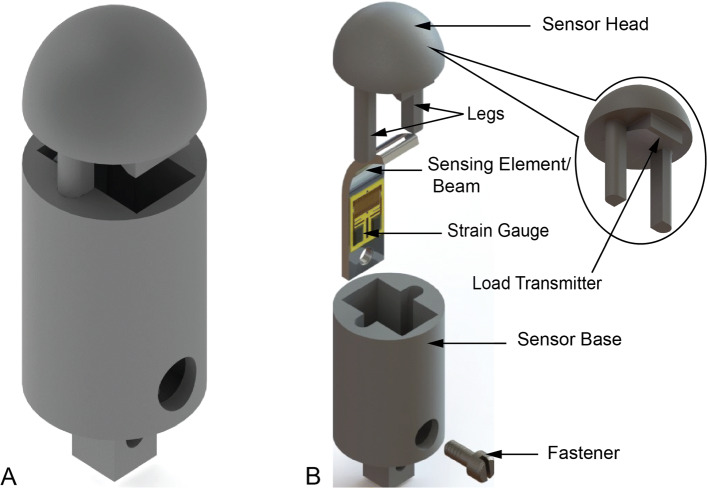
Background: Tissue healthiness could be assessed by evaluating its viscoelastic properties through localized contact reaction force measurements to obtain quantitative time history information. To evaluate these properties for hard to reach and confined areas of the human body, miniature force sensors with size constraints and appropriate load capabilities are needed. This research article reports on the design, fabrication, integration, characterization, and in vivo experimentation of a uniaxial miniature force sensor on a human forearm.
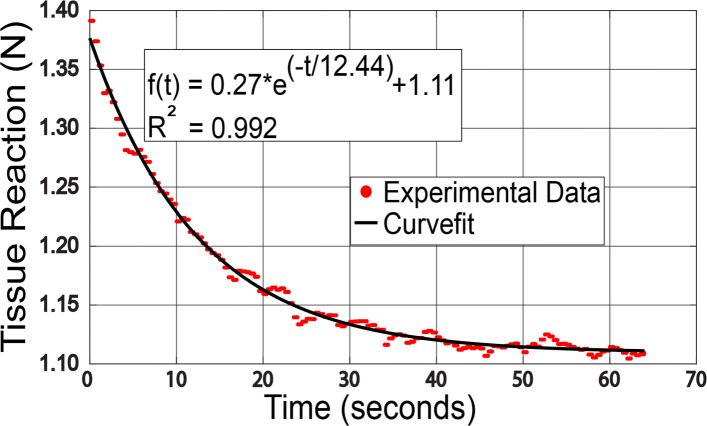
Methods: The strain gauge based sensor components were designed to meet dimensional constraints (diameter ≤3.5mm), safety factor (≥3) and performance specifications (maximum applied load, resolution, sensitivity, and accuracy). The sensing element was fabricated using traditional machining. Inverted vat photopolymerization technology was used to prototype complex components on a Form3 printer; micro-component orientation for fabrication challenges were overcome through experimentation. The sensor performance was characterized using dead weights and a LabVIEW based custom developed data acquisition system. The operational performance was evaluated by in vivo measurements on a human forearm; the relaxation data were used to calculate the Voigt model viscoelastic coefficient.
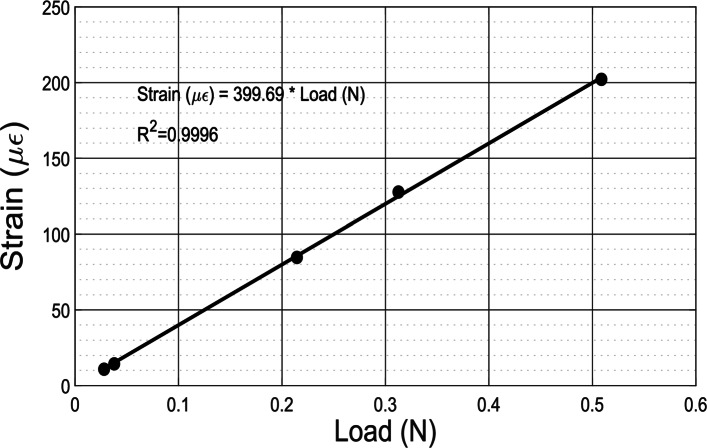
Results: The three dimensional (3D) printed components exhibited good dimensional accuracy (maximum deviation of 183μm). The assembled sensor exhibited linear behavior (regression coefficient of R2=0.999) and met desired performance specifications of 3.4 safety factor, 1.2N load capacity, 18mN resolution, and 3.13% accuracy. The in vivo experimentally obtained relaxation data were analyzed using the Voigt model yielding a viscoelastic coefficient τ=12.38sec and a curve-fit regression coefficient of R2=0.992.
Conclusions: This research presented the successful design, use of 3D printing for component fabrication, integration, characterization, and analysis of initial in vivo collected measurements with excellent performance for a miniature force sensor for the assessment of tissue viscoelastic properties. Through this research certain limitations were identified, however the initial sensor performance was promising and encouraging to continue the work to improve the sensor. This micro-force sensor could be used to obtain tissue quantitative data to assess tissue healthiness for medical care over extended time periods.
期刊介绍:
ACS Applied Electronic Materials is an interdisciplinary journal publishing original research covering all aspects of electronic materials. The journal is devoted to reports of new and original experimental and theoretical research of an applied nature that integrate knowledge in the areas of materials science, engineering, optics, physics, and chemistry into important applications of electronic materials. Sample research topics that span the journal's scope are inorganic, organic, ionic and polymeric materials with properties that include conducting, semiconducting, superconducting, insulating, dielectric, magnetic, optoelectronic, piezoelectric, ferroelectric and thermoelectric.
Indexed/Abstracted:
Web of Science SCIE
Scopus
CAS
INSPEC
Portico
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


