Aaron Fleming, Stephanie Huang, Elizabeth Buxton, Frank Hodges, He Helen Huang
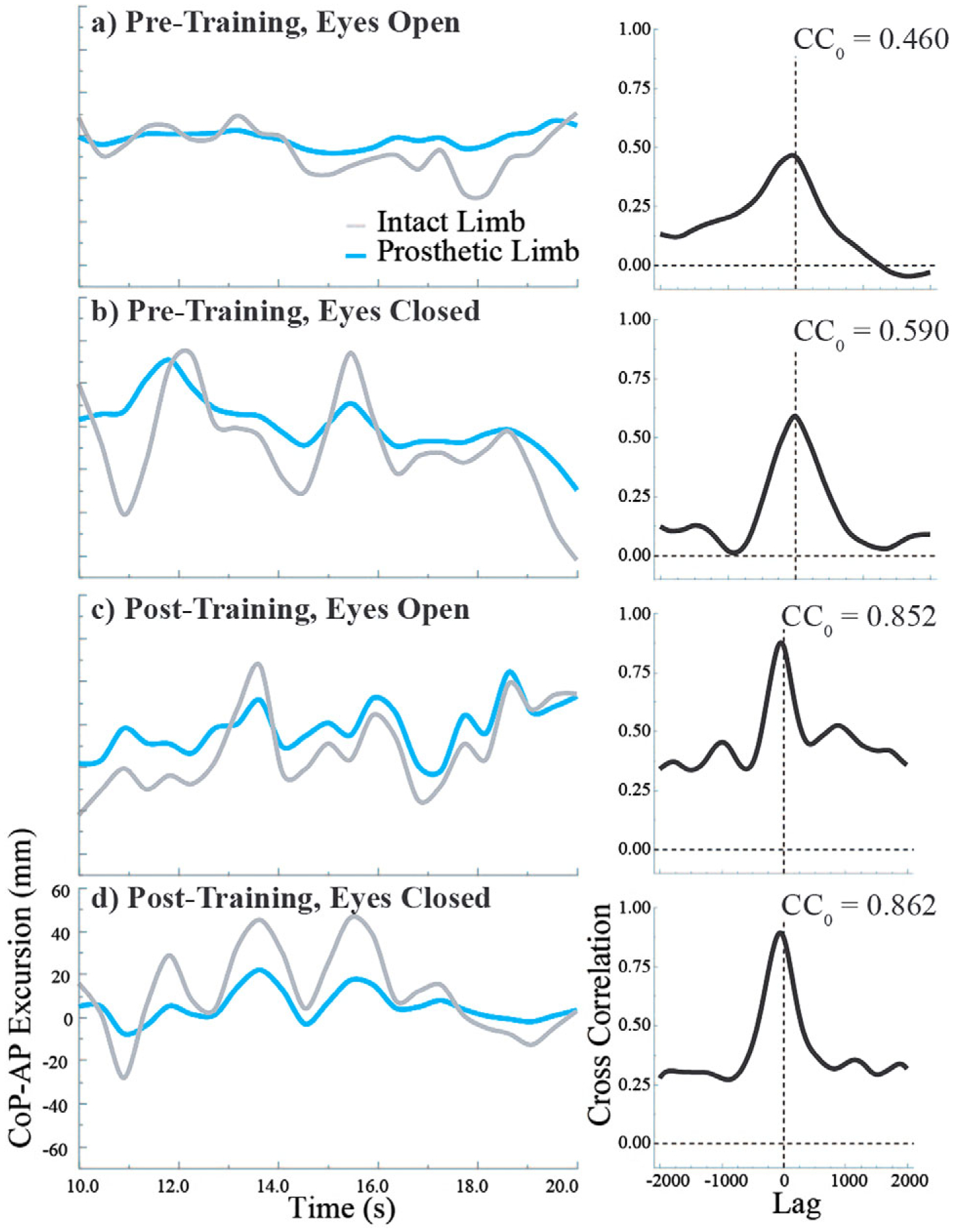
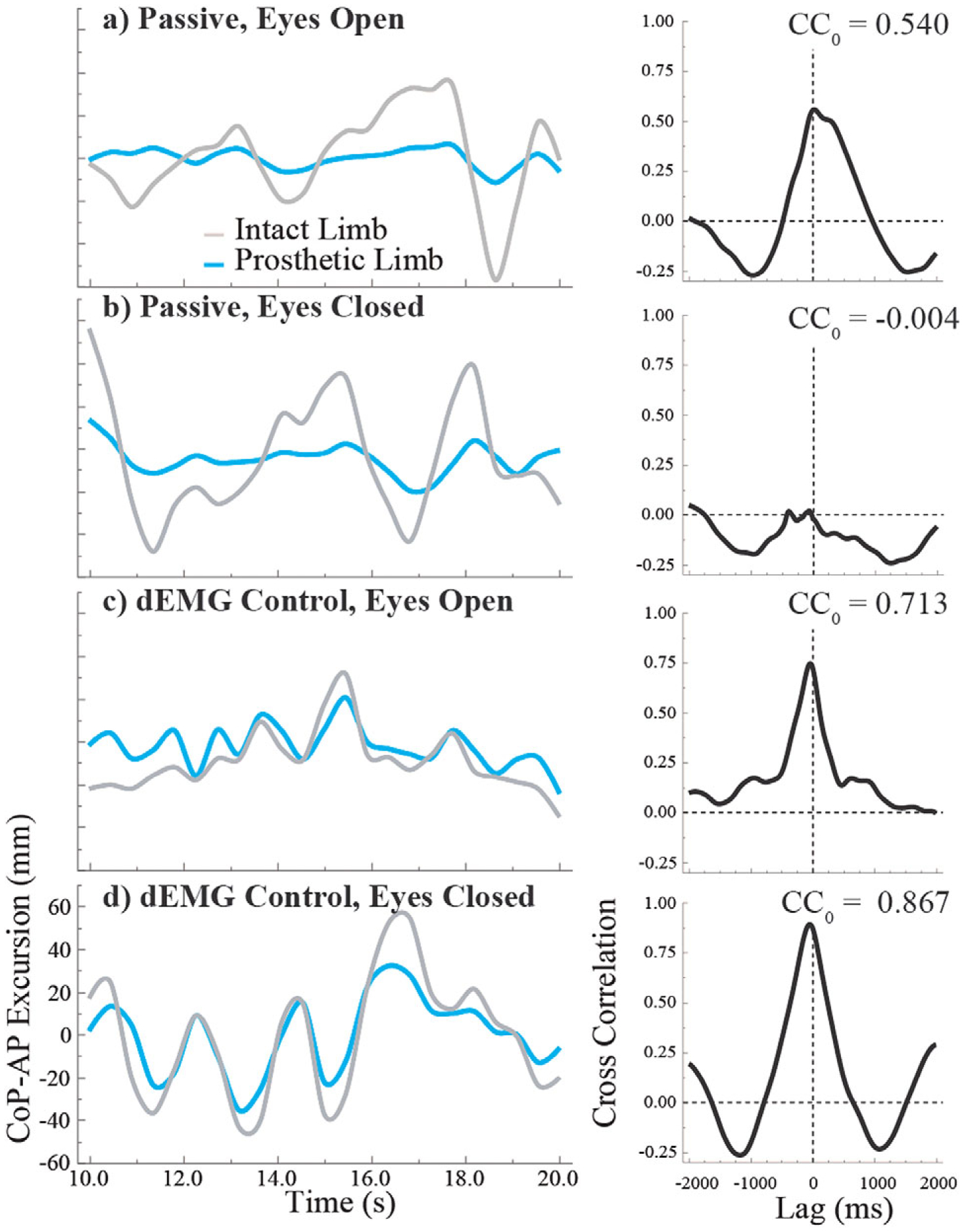
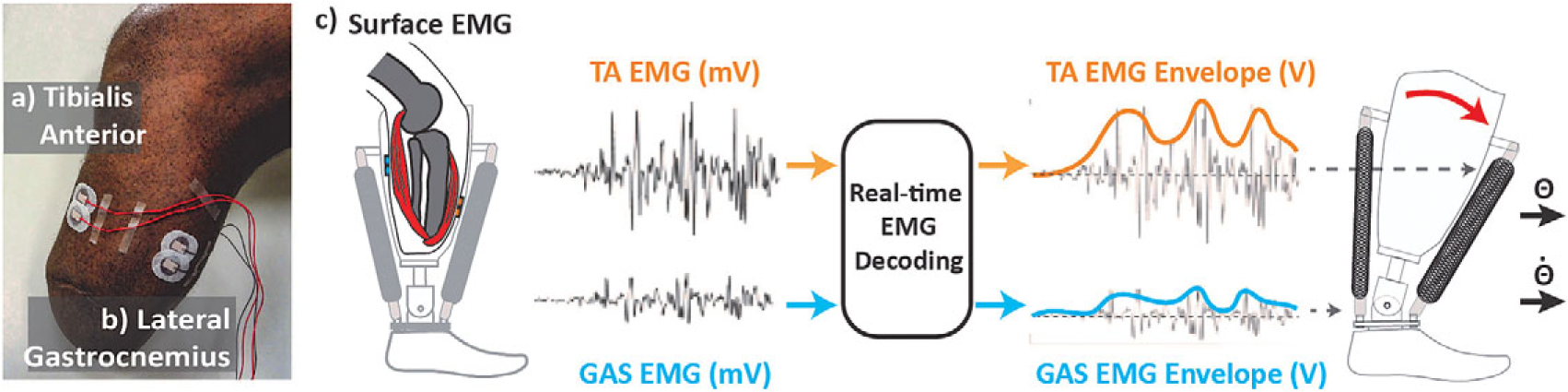
{"title":"直接连续肌电图控制的动力假肢踝关节改善姿势控制后的指导体育训练:一个案例研究。","authors":"Aaron Fleming, Stephanie Huang, Elizabeth Buxton, Frank Hodges, He Helen Huang","doi":"10.1017/wtc.2021.2","DOIUrl":null,"url":null,"abstract":"<p><p>Despite the promise of powered lower limb prostheses, existing controllers do not assist many daily activities that require continuous control of prosthetic joints according to human states and environments. The objective of this case study was to investigate the feasibility of direct, continuous electromyographic (dEMG) control of a powered ankle prosthesis, combined with physical therapist-guided training, for improved standing postural control in an individual with transtibial amputation. Specifically, EMG signals of the residual antagonistic muscles (i.e. <i>lateral gastrocnemius</i> and <i>tibialis anterior)</i> were used to proportionally drive pneumatical artificial muscles to move a prosthetic ankle. Clinical-based activities were used in the training and evaluation protocol of the control paradigm. We quantified the EMG signals in the bilateral shank muscles as well as measures of postural control and stability. Compared to the participant's daily passive prosthesis, the dEMG-controlled ankle, combined with the training, yielded improved clinical balance scores and reduced compensation from intact joints. Cross-correlation coefficient of bilateral center of pressure excursions, a metric for quantifying standing postural control, increased to .83(±.07) when using dEMG ankle control (<i>passive device:</i> .39(±.29)). We observed synchronized activation of homologous muscles, rapid improvement in performance on the first day of the training for load transfer tasks, and further improvement in performance across training days <i>(p</i> = <i>.006).</i> This case study showed the feasibility of this dEMG control paradigm of a powered prosthetic ankle to assist postural control. This study lays the foundation for future study to extend these results through the inclusion of more participants and activities.</p>","PeriodicalId":75318,"journal":{"name":"Wearable technologies","volume":"2 ","pages":""},"PeriodicalIF":2.8000,"publicationDate":"2021-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.1017/wtc.2021.2","citationCount":"16","resultStr":"{\"title\":\"Direct continuous electromyographic control of a powered prosthetic ankle for improved postural control after guided physical training: A case study.\",\"authors\":\"Aaron Fleming, Stephanie Huang, Elizabeth Buxton, Frank Hodges, He Helen Huang\",\"doi\":\"10.1017/wtc.2021.2\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Despite the promise of powered lower limb prostheses, existing controllers do not assist many daily activities that require continuous control of prosthetic joints according to human states and environments. The objective of this case study was to investigate the feasibility of direct, continuous electromyographic (dEMG) control of a powered ankle prosthesis, combined with physical therapist-guided training, for improved standing postural control in an individual with transtibial amputation. Specifically, EMG signals of the residual antagonistic muscles (i.e. <i>lateral gastrocnemius</i> and <i>tibialis anterior)</i> were used to proportionally drive pneumatical artificial muscles to move a prosthetic ankle. Clinical-based activities were used in the training and evaluation protocol of the control paradigm. We quantified the EMG signals in the bilateral shank muscles as well as measures of postural control and stability. Compared to the participant's daily passive prosthesis, the dEMG-controlled ankle, combined with the training, yielded improved clinical balance scores and reduced compensation from intact joints. Cross-correlation coefficient of bilateral center of pressure excursions, a metric for quantifying standing postural control, increased to .83(±.07) when using dEMG ankle control (<i>passive device:</i> .39(±.29)). We observed synchronized activation of homologous muscles, rapid improvement in performance on the first day of the training for load transfer tasks, and further improvement in performance across training days <i>(p</i> = <i>.006).</i> This case study showed the feasibility of this dEMG control paradigm of a powered prosthetic ankle to assist postural control. This study lays the foundation for future study to extend these results through the inclusion of more participants and activities.</p>\",\"PeriodicalId\":75318,\"journal\":{\"name\":\"Wearable technologies\",\"volume\":\"2 \",\"pages\":\"\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2021-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://sci-hub-pdf.com/10.1017/wtc.2021.2\",\"citationCount\":\"16\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Wearable technologies\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1017/wtc.2021.2\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2021/4/12 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Wearable technologies","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1017/wtc.2021.2","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2021/4/12 0:00:00","PubModel":"Epub","JCR":"Q2","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
Direct continuous electromyographic control of a powered prosthetic ankle for improved postural control after guided physical training: A case study.
Despite the promise of powered lower limb prostheses, existing controllers do not assist many daily activities that require continuous control of prosthetic joints according to human states and environments. The objective of this case study was to investigate the feasibility of direct, continuous electromyographic (dEMG) control of a powered ankle prosthesis, combined with physical therapist-guided training, for improved standing postural control in an individual with transtibial amputation. Specifically, EMG signals of the residual antagonistic muscles (i.e. lateral gastrocnemius and tibialis anterior) were used to proportionally drive pneumatical artificial muscles to move a prosthetic ankle. Clinical-based activities were used in the training and evaluation protocol of the control paradigm. We quantified the EMG signals in the bilateral shank muscles as well as measures of postural control and stability. Compared to the participant's daily passive prosthesis, the dEMG-controlled ankle, combined with the training, yielded improved clinical balance scores and reduced compensation from intact joints. Cross-correlation coefficient of bilateral center of pressure excursions, a metric for quantifying standing postural control, increased to .83(±.07) when using dEMG ankle control (passive device: .39(±.29)). We observed synchronized activation of homologous muscles, rapid improvement in performance on the first day of the training for load transfer tasks, and further improvement in performance across training days (p = .006). This case study showed the feasibility of this dEMG control paradigm of a powered prosthetic ankle to assist postural control. This study lays the foundation for future study to extend these results through the inclusion of more participants and activities.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


