Zahra Kadivar, Christopher E Beck, Roger N Rovekamp, Marcia K O'Malley
{"title":"用于颅脑外伤后上肢运动支持的单肢电缆驱动可穿戴机器人装置。","authors":"Zahra Kadivar, Christopher E Beck, Roger N Rovekamp, Marcia K O'Malley","doi":"10.1177/20556683211002448","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Recently, soft exosuits have been proposed for upper limb movement assistance, most supporting single joint movements. We describe the design of a portable wearable robotic device (WRD), \"Armstrong,\" able to support three degrees-of-freedom of arm movements, and report on its feasibility for movement support of individuals with hemiparesis after traumatic brain injury (TBI).</p><p><strong>Methods: </strong>We introduce Armstrong and report on a pilot evaluation with two male individuals post-TBI (T1 and T2) and two healthy individuals. Testing involved elbow flexion/extension with and without robotic-assisted shoulder stabilization; shoulder abduction with and without robotic-assisted elbow stabilization; and assisted shoulder abduction and flexion. Outcome measures included range of motion and root mean square trajectory and velocity errors.</p><p><strong>Results: </strong>TBI subjects performed active, passive, hybrid and active assistive movements with Armstrong. Subjects showed improvements in movement trajectory and velocity. T1 benefited from hybrid, active, and assistive modes due to upper extremity weakness and muscle tone. T2 benefited from hybrid and assistive modes due to impaired coordination. Healthy subjects performed isolated movements of shoulder and elbow with minimal trajectory and velocity errors.</p><p><strong>Conclusions: </strong>This study demonstrates the safety and feasibility of Armstrong for upper extremity movement assistance for individuals with TBI, with therapist supervision.</p>","PeriodicalId":43319,"journal":{"name":"Journal of Rehabilitation and Assistive Technologies Engineering","volume":"8 ","pages":"20556683211002448"},"PeriodicalIF":2.0000,"publicationDate":"2021-06-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.1177/20556683211002448","citationCount":"1","resultStr":"{\"title\":\"Single limb cable driven wearable robotic device for upper extremity movement support after traumatic brain injury.\",\"authors\":\"Zahra Kadivar, Christopher E Beck, Roger N Rovekamp, Marcia K O'Malley\",\"doi\":\"10.1177/20556683211002448\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Introduction: </strong>Recently, soft exosuits have been proposed for upper limb movement assistance, most supporting single joint movements. We describe the design of a portable wearable robotic device (WRD), \\\"Armstrong,\\\" able to support three degrees-of-freedom of arm movements, and report on its feasibility for movement support of individuals with hemiparesis after traumatic brain injury (TBI).</p><p><strong>Methods: </strong>We introduce Armstrong and report on a pilot evaluation with two male individuals post-TBI (T1 and T2) and two healthy individuals. Testing involved elbow flexion/extension with and without robotic-assisted shoulder stabilization; shoulder abduction with and without robotic-assisted elbow stabilization; and assisted shoulder abduction and flexion. Outcome measures included range of motion and root mean square trajectory and velocity errors.</p><p><strong>Results: </strong>TBI subjects performed active, passive, hybrid and active assistive movements with Armstrong. Subjects showed improvements in movement trajectory and velocity. T1 benefited from hybrid, active, and assistive modes due to upper extremity weakness and muscle tone. T2 benefited from hybrid and assistive modes due to impaired coordination. Healthy subjects performed isolated movements of shoulder and elbow with minimal trajectory and velocity errors.</p><p><strong>Conclusions: </strong>This study demonstrates the safety and feasibility of Armstrong for upper extremity movement assistance for individuals with TBI, with therapist supervision.</p>\",\"PeriodicalId\":43319,\"journal\":{\"name\":\"Journal of Rehabilitation and Assistive Technologies Engineering\",\"volume\":\"8 \",\"pages\":\"20556683211002448\"},\"PeriodicalIF\":2.0000,\"publicationDate\":\"2021-06-02\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://sci-hub-pdf.com/10.1177/20556683211002448\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Rehabilitation and Assistive Technologies Engineering\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1177/20556683211002448\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2021/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Rehabilitation and Assistive Technologies Engineering","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1177/20556683211002448","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2021/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
Single limb cable driven wearable robotic device for upper extremity movement support after traumatic brain injury.
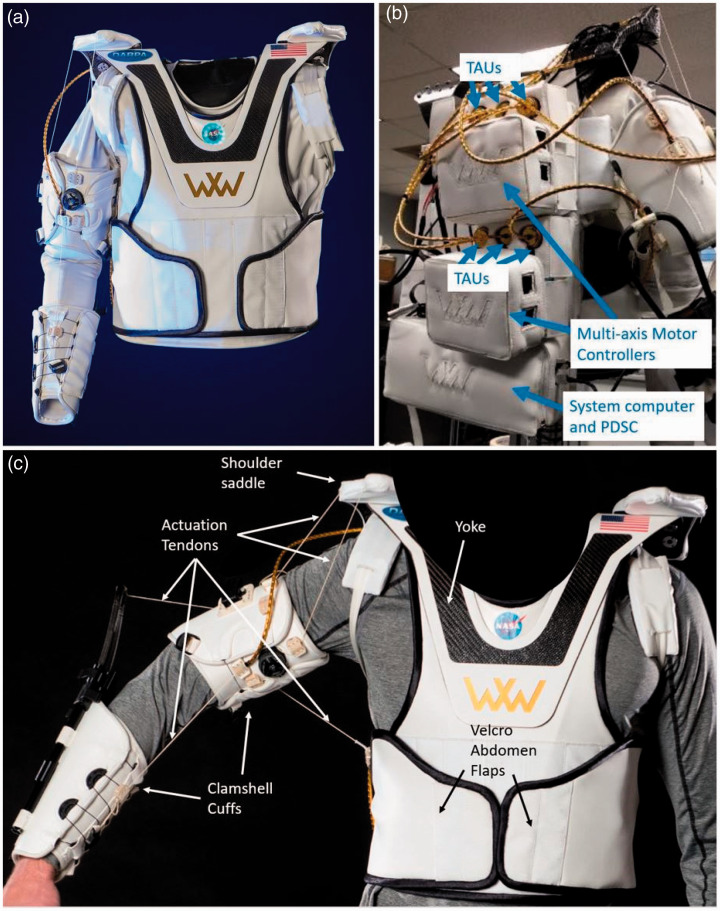
Introduction: Recently, soft exosuits have been proposed for upper limb movement assistance, most supporting single joint movements. We describe the design of a portable wearable robotic device (WRD), "Armstrong," able to support three degrees-of-freedom of arm movements, and report on its feasibility for movement support of individuals with hemiparesis after traumatic brain injury (TBI).
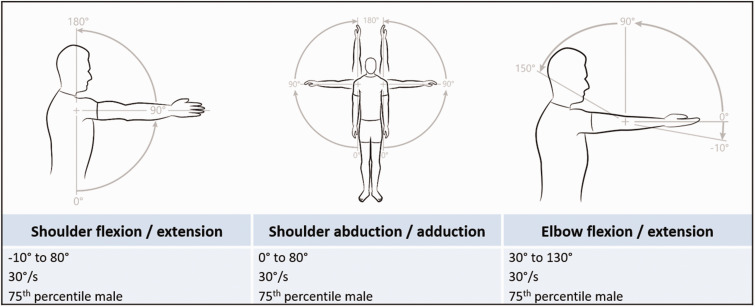
Methods: We introduce Armstrong and report on a pilot evaluation with two male individuals post-TBI (T1 and T2) and two healthy individuals. Testing involved elbow flexion/extension with and without robotic-assisted shoulder stabilization; shoulder abduction with and without robotic-assisted elbow stabilization; and assisted shoulder abduction and flexion. Outcome measures included range of motion and root mean square trajectory and velocity errors.
Results: TBI subjects performed active, passive, hybrid and active assistive movements with Armstrong. Subjects showed improvements in movement trajectory and velocity. T1 benefited from hybrid, active, and assistive modes due to upper extremity weakness and muscle tone. T2 benefited from hybrid and assistive modes due to impaired coordination. Healthy subjects performed isolated movements of shoulder and elbow with minimal trajectory and velocity errors.
Conclusions: This study demonstrates the safety and feasibility of Armstrong for upper extremity movement assistance for individuals with TBI, with therapist supervision.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


