Q.Y. Hamid , W.Z. Wan Hasan , M.A. Azmah Hanim , A.A. Nuraini , M.N. Hamidon , H.R. Ramli
{"title":"形状记忆合金驱动上肢装置:综述","authors":"Q.Y. Hamid , W.Z. Wan Hasan , M.A. Azmah Hanim , A.A. Nuraini , M.N. Hamidon , H.R. Ramli","doi":"10.1016/j.snr.2023.100160","DOIUrl":null,"url":null,"abstract":"<div><p>Recently, significant efforts have been made to develop prostheses, soft rehabilitation, and assistive devices that enhance the quality of life of limb amputees and the activities of daily living (ADL) of stroke patients. Therefore, this present study provides a general overview of the current prosthetic, assistive, and rehabilitative devices with a focus on actuators that provide actuation via shape-memory alloys (SMA). Shape-memory alloy (SMA)-based actuators are the subject of considerable research as they possess high force-to-weight ratio, quiet operation, muscular mobility, bio-compatibility, and accessible design options, all of which can potentially be used to develop inventive actuating systems. Several studies have examined the use of SMA-actuated devices in the medical and engineering industry. They have also, more recently, been used to develop soft robotic systems. This present review primarily focuses on the characterization, number, type of actuator, degrees of freedom (DOF), weight, cooling technique, control strategies, and applications as well as the advantages and disadvantages of plate, spring, and wire-based SMA actuators. Composite-based upper limb SMA actuators were also reviewed and compared in terms of the matrix, reinforcing materials, SMA configuration actuator dimensions, and manufacturing method as well as their advantages and disadvantages. The findings indicate that, in the last few years, more studies have examined developing novel intelligent materials with which to improve hand flexibility. Therefore, SMA materials have a promising future in the development of intelligent designs for hand-robots. They may also be used to improve control robustness as well as the accuracy of hand functions for ADL and effective rehabilitation.</p></div>","PeriodicalId":426,"journal":{"name":"Sensors and Actuators Reports","volume":null,"pages":null},"PeriodicalIF":6.5000,"publicationDate":"2023-06-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"1","resultStr":"{\"title\":\"Shape memory alloys actuated upper limb devices: A review\",\"authors\":\"Q.Y. Hamid , W.Z. Wan Hasan , M.A. Azmah Hanim , A.A. Nuraini , M.N. Hamidon , H.R. Ramli\",\"doi\":\"10.1016/j.snr.2023.100160\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Recently, significant efforts have been made to develop prostheses, soft rehabilitation, and assistive devices that enhance the quality of life of limb amputees and the activities of daily living (ADL) of stroke patients. Therefore, this present study provides a general overview of the current prosthetic, assistive, and rehabilitative devices with a focus on actuators that provide actuation via shape-memory alloys (SMA). Shape-memory alloy (SMA)-based actuators are the subject of considerable research as they possess high force-to-weight ratio, quiet operation, muscular mobility, bio-compatibility, and accessible design options, all of which can potentially be used to develop inventive actuating systems. Several studies have examined the use of SMA-actuated devices in the medical and engineering industry. They have also, more recently, been used to develop soft robotic systems. This present review primarily focuses on the characterization, number, type of actuator, degrees of freedom (DOF), weight, cooling technique, control strategies, and applications as well as the advantages and disadvantages of plate, spring, and wire-based SMA actuators. Composite-based upper limb SMA actuators were also reviewed and compared in terms of the matrix, reinforcing materials, SMA configuration actuator dimensions, and manufacturing method as well as their advantages and disadvantages. The findings indicate that, in the last few years, more studies have examined developing novel intelligent materials with which to improve hand flexibility. Therefore, SMA materials have a promising future in the development of intelligent designs for hand-robots. They may also be used to improve control robustness as well as the accuracy of hand functions for ADL and effective rehabilitation.</p></div>\",\"PeriodicalId\":426,\"journal\":{\"name\":\"Sensors and Actuators Reports\",\"volume\":null,\"pages\":null},\"PeriodicalIF\":6.5000,\"publicationDate\":\"2023-06-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Sensors and Actuators Reports\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2666053923000231\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"BIOTECHNOLOGY & APPLIED MICROBIOLOGY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Sensors and Actuators Reports","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2666053923000231","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"BIOTECHNOLOGY & APPLIED MICROBIOLOGY","Score":null,"Total":0}
Shape memory alloys actuated upper limb devices: A review
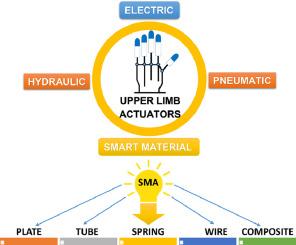
Recently, significant efforts have been made to develop prostheses, soft rehabilitation, and assistive devices that enhance the quality of life of limb amputees and the activities of daily living (ADL) of stroke patients. Therefore, this present study provides a general overview of the current prosthetic, assistive, and rehabilitative devices with a focus on actuators that provide actuation via shape-memory alloys (SMA). Shape-memory alloy (SMA)-based actuators are the subject of considerable research as they possess high force-to-weight ratio, quiet operation, muscular mobility, bio-compatibility, and accessible design options, all of which can potentially be used to develop inventive actuating systems. Several studies have examined the use of SMA-actuated devices in the medical and engineering industry. They have also, more recently, been used to develop soft robotic systems. This present review primarily focuses on the characterization, number, type of actuator, degrees of freedom (DOF), weight, cooling technique, control strategies, and applications as well as the advantages and disadvantages of plate, spring, and wire-based SMA actuators. Composite-based upper limb SMA actuators were also reviewed and compared in terms of the matrix, reinforcing materials, SMA configuration actuator dimensions, and manufacturing method as well as their advantages and disadvantages. The findings indicate that, in the last few years, more studies have examined developing novel intelligent materials with which to improve hand flexibility. Therefore, SMA materials have a promising future in the development of intelligent designs for hand-robots. They may also be used to improve control robustness as well as the accuracy of hand functions for ADL and effective rehabilitation.
期刊介绍:
Sensors and Actuators Reports is a peer-reviewed open access journal launched out from the Sensors and Actuators journal family. Sensors and Actuators Reports is dedicated to publishing new and original works in the field of all type of sensors and actuators, including bio-, chemical-, physical-, and nano- sensors and actuators, which demonstrates significant progress beyond the current state of the art. The journal regularly publishes original research papers, reviews, and short communications.
For research papers and short communications, the journal aims to publish the new and original work supported by experimental results and as such purely theoretical works are not accepted.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


