{"title":"机器人辅助系统在肺结节术前钩丝定位中的初步临床经验:一项前瞻性先导研究。","authors":"Pengfei Li, Wenheng Zheng, Zheng Wang, Xueling Zhang, Zhuang Tong, Liang Zhang, Hehuan Yao, Chenlei Zhang, Gebang Wang, Yu Liu, Zheyu Liu, Yegang Ma, Weiguo Xie, Bingding Huang, Hongxu Liu","doi":"10.1007/s11701-025-02824-1","DOIUrl":null,"url":null,"abstract":"<p><p>Accurate preoperative localization is critical for the surgical resection of small pulmonary nodules, yet conventional CT-guided hookwire placement remains operator-dependent and technically demanding. This prospective study evaluated the clinical performance of a robot-assisted navigation system for CT-guided preoperative hookwire localization of pulmonary nodules. The trial enrolled 60 patients scheduled for localization followed by VATS. Primary endpoints included first-attempt puncture success rate, needle placement accuracy, localization success rate, procedure duration, number of punctures, radiation dose, and complication rate, with subgroup analyses by lesion characteristic and patient positioning. The first-attempt puncture success rate was 100.0%, with an median needle placement accuracy of 5.7 mm (IQR 4.2-7.9). Localization success was achieved in 94.8% of nodules (55/58). The median procedure duration was 16.6 min (14.0-22.9), and the median radiation dose was 281.2 mGy·cm (227.1-365.8). The overall complication rate was 5.2% (3/58). Accuracy was consistent across subgroups, although lower lobe lesions and prone positioning were associated with longer procedure times, and prone positioning also increased radiation exposure, without compromising accuracy. These findings demonstrate the feasibility, precision, and safety of this system, supporting its potential to standardize and improve preoperative localization in thoracic surgery. Trial registration: Registry: https://www.chictr.org.cn/ , TRN: ChiCTR2500095919, Registration date: January 15, 2025.</p>","PeriodicalId":47616,"journal":{"name":"Journal of Robotic Surgery","volume":"19 1","pages":"690"},"PeriodicalIF":3.0000,"publicationDate":"2025-10-14","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12521279/pdf/","citationCount":"0","resultStr":"{\"title\":\"Preliminary clinical experience with a robot-assisted system in preoperative hookwire localization of pulmonary nodules: a prospective pilot study.\",\"authors\":\"Pengfei Li, Wenheng Zheng, Zheng Wang, Xueling Zhang, Zhuang Tong, Liang Zhang, Hehuan Yao, Chenlei Zhang, Gebang Wang, Yu Liu, Zheyu Liu, Yegang Ma, Weiguo Xie, Bingding Huang, Hongxu Liu\",\"doi\":\"10.1007/s11701-025-02824-1\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Accurate preoperative localization is critical for the surgical resection of small pulmonary nodules, yet conventional CT-guided hookwire placement remains operator-dependent and technically demanding. This prospective study evaluated the clinical performance of a robot-assisted navigation system for CT-guided preoperative hookwire localization of pulmonary nodules. The trial enrolled 60 patients scheduled for localization followed by VATS. Primary endpoints included first-attempt puncture success rate, needle placement accuracy, localization success rate, procedure duration, number of punctures, radiation dose, and complication rate, with subgroup analyses by lesion characteristic and patient positioning. The first-attempt puncture success rate was 100.0%, with an median needle placement accuracy of 5.7 mm (IQR 4.2-7.9). Localization success was achieved in 94.8% of nodules (55/58). The median procedure duration was 16.6 min (14.0-22.9), and the median radiation dose was 281.2 mGy·cm (227.1-365.8). The overall complication rate was 5.2% (3/58). Accuracy was consistent across subgroups, although lower lobe lesions and prone positioning were associated with longer procedure times, and prone positioning also increased radiation exposure, without compromising accuracy. These findings demonstrate the feasibility, precision, and safety of this system, supporting its potential to standardize and improve preoperative localization in thoracic surgery. Trial registration: Registry: https://www.chictr.org.cn/ , TRN: ChiCTR2500095919, Registration date: January 15, 2025.</p>\",\"PeriodicalId\":47616,\"journal\":{\"name\":\"Journal of Robotic Surgery\",\"volume\":\"19 1\",\"pages\":\"690\"},\"PeriodicalIF\":3.0000,\"publicationDate\":\"2025-10-14\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12521279/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Robotic Surgery\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://doi.org/10.1007/s11701-025-02824-1\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"SURGERY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Robotic Surgery","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.1007/s11701-025-02824-1","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"SURGERY","Score":null,"Total":0}
Preliminary clinical experience with a robot-assisted system in preoperative hookwire localization of pulmonary nodules: a prospective pilot study.
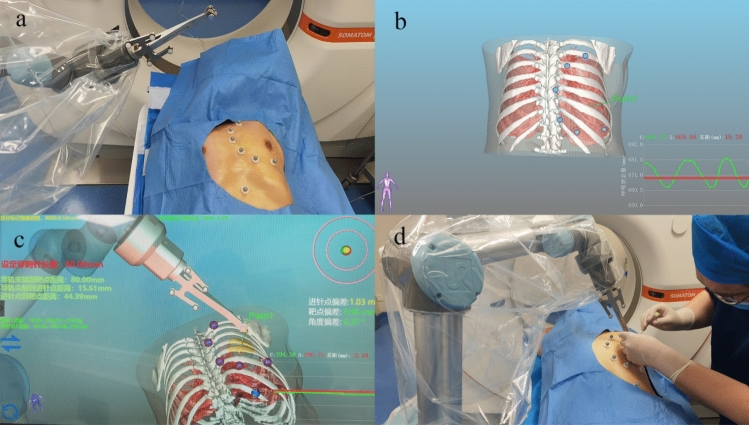
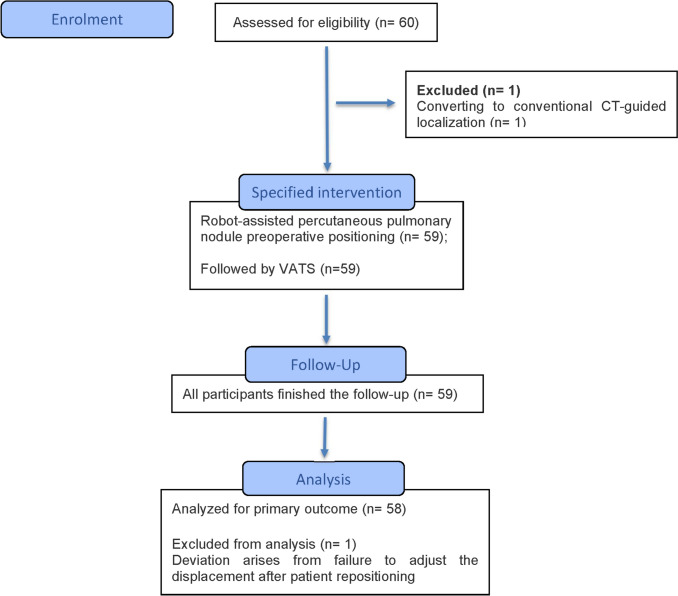
Accurate preoperative localization is critical for the surgical resection of small pulmonary nodules, yet conventional CT-guided hookwire placement remains operator-dependent and technically demanding. This prospective study evaluated the clinical performance of a robot-assisted navigation system for CT-guided preoperative hookwire localization of pulmonary nodules. The trial enrolled 60 patients scheduled for localization followed by VATS. Primary endpoints included first-attempt puncture success rate, needle placement accuracy, localization success rate, procedure duration, number of punctures, radiation dose, and complication rate, with subgroup analyses by lesion characteristic and patient positioning. The first-attempt puncture success rate was 100.0%, with an median needle placement accuracy of 5.7 mm (IQR 4.2-7.9). Localization success was achieved in 94.8% of nodules (55/58). The median procedure duration was 16.6 min (14.0-22.9), and the median radiation dose was 281.2 mGy·cm (227.1-365.8). The overall complication rate was 5.2% (3/58). Accuracy was consistent across subgroups, although lower lobe lesions and prone positioning were associated with longer procedure times, and prone positioning also increased radiation exposure, without compromising accuracy. These findings demonstrate the feasibility, precision, and safety of this system, supporting its potential to standardize and improve preoperative localization in thoracic surgery. Trial registration: Registry: https://www.chictr.org.cn/ , TRN: ChiCTR2500095919, Registration date: January 15, 2025.
期刊介绍:
The aim of the Journal of Robotic Surgery is to become the leading worldwide journal for publication of articles related to robotic surgery, encompassing surgical simulation and integrated imaging techniques. The journal provides a centralized, focused resource for physicians wishing to publish their experience or those wishing to avail themselves of the most up-to-date findings.The journal reports on advance in a wide range of surgical specialties including adult and pediatric urology, general surgery, cardiac surgery, gynecology, ENT, orthopedics and neurosurgery.The use of robotics in surgery is broad-based and will undoubtedly expand over the next decade as new technical innovations and techniques increase the applicability of its use. The journal intends to capture this trend as it develops.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


