人机交互的上下文感知、主动和自适应对话
IF 5.2
2区 计算机科学
Q1 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
摘要
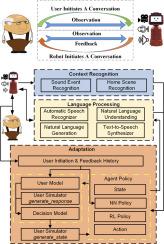
社交机器人正在进入我们的日常生活。现有的会话机器人大多是被动的,因为交互通常是由用户发起的。通过了解环境背景,比如人们的日常活动,机器人可以变得更加智能和主动。本文提出了一种用于人机交互(HRI)的上下文感知对话自适应系统(CACAS)。首先,开发上下文识别模块和语言处理模块,获取上下文信息、用户意图和插槽,这些信息成为系统状态的一部分。其次,利用强化学习算法在模拟HRI环境中训练初始策略。使用初始策略通过HRI收集用户反馈数据。第三,基于用户反馈,提出了一种结合强化学习和监督学习的新策略。我们进行了模拟用户测试和真实的人体受试者测试来评估拟议的CACAS。结果表明,该系统在真实人体受试者测试中的成功率为85%,87.5%的受试者对适应结果满意。对于模拟测试,与基线方法相比,CACAS具有最高的成功率。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Context-aware proactive and adaptive conversation for human–robot interaction
Social robots are coming into our daily life. Existing conversational robots are mostly reactive in that the interactions are usually initiated by the users. With the knowledge of the environmental context such as people’s daily activities, robots can be more intelligent and proactive. In this paper, we proposed a context-aware conversation adaptation system (CACAS) for human–robot interaction (HRI). First, a context recognition module and a language processing module are developed to obtain the context information, user intent and slots, which become part of the system state. Second, a reinforcement learning algorithm is utilized to train an initial policy in a simulated HRI environment. User feedback data is collected through HRI using the initial policy. Third, a new policy that combines the reinforcement learning-based policy and a supervised learning-based policy is adapted based on the user feedback. We conducted both simulated user tests and real human subject tests to evaluate the proposed CACAS. The results show that the CACAS achieved a success rate of 85% in the real human subject test and 87.5% of participants were satisfied with the adaptation results. For the simulation test, the CACAS had the highest success rate compared with the baseline methods.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Robotics and Autonomous Systems
工程技术-机器人学
CiteScore
9.00
自引率
7.00%
发文量
164
审稿时长
4.5 months
期刊介绍:
Robotics and Autonomous Systems will carry articles describing fundamental developments in the field of robotics, with special emphasis on autonomous systems. An important goal of this journal is to extend the state of the art in both symbolic and sensory based robot control and learning in the context of autonomous systems.
Robotics and Autonomous Systems will carry articles on the theoretical, computational and experimental aspects of autonomous systems, or modules of such systems.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


