基于知识增强深度学习的域自适应点云语义分割
IF 7.6
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
摘要
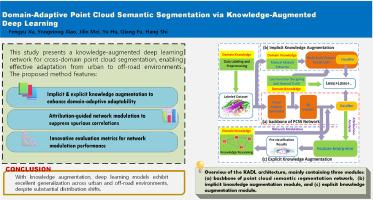
由于训练数据的质量和数量的限制,点云语义分割的监督深度学习方法往往表现出较差的泛化和幻觉,特别是在自动驾驶应用中处理非结构化场景时。这些挑战促使我们开发基于知识增强深度学习的领域自适应点云语义分割网络,该网络可以在城市数据集上进行训练后应用于越野场景。具体来说,我们的方法采用了隐式和显式知识增强相结合的策略。此外,利用基于归因分析的网络调制将领域知识整合到深度学习模型中,从而降低模型对虚假相关的敏感性。此外,我们提出了新的网络调制性能指标来评估调制校正的效率和效益。为了进行实验验证,我们分别在训练和测试阶段使用了城市和越野环境之间存在显著差异的数据集。此外,我们还发布了自采集的越野数据集PCSS-Gobi-3D,这是戈壁沙漠场景的第一个点云数据集。与其他领域自适应方法相比,我们的方法在平均交联数(Intersection over Union, mIoU)和总体精度方面表现出了良好的跨领域3D语义分割性能。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Domain-adaptive point cloud semantic segmentation via knowledge-augmented deep learning
Owing to limitations in both the quality and quantity of training data, supervised deep learning methods for point cloud semantic segmentation often exhibit poor generalization and hallucinations, particularly when unstructured scenes are processed in autonomous driving applications. These challenges motivate us to develop a domain-adaptive point cloud semantic segmentation network based on knowledge-augmented deep learning, which can be applied to off-road scenes after being trained on urban datasets. Specifically, our method adopts the strategy of combining implicit and explicit knowledge augmentation. Moreover, network modulation based on attribution analysis is employed to integrate domain knowledge into the deep learning model, thereby mitigating the model’s susceptibility to spurious correlations. Additionally, we propose new network modulation performance metrics to evaluate the efficiency and benefit of modulation correction. For experimental validation, we use datasets with significant disparities between the urban and off-road environments in the training and testing phases, respectively. Furthermore, we release our self-collected off-road dataset PCSS-Gobi-3D, which is the first point cloud dataset of the Gobi Desert scene. Compared with other domain-adaptive methods, our method demonstrates promising cross-domain 3D semantic segmentation performance with excellent results in terms of mean Intersection over Union (mIoU) and overall accuracy.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Pattern Recognition
工程技术-工程:电子与电气
CiteScore
14.40
自引率
16.20%
发文量
683
审稿时长
5.6 months
期刊介绍:
The field of Pattern Recognition is both mature and rapidly evolving, playing a crucial role in various related fields such as computer vision, image processing, text analysis, and neural networks. It closely intersects with machine learning and is being applied in emerging areas like biometrics, bioinformatics, multimedia data analysis, and data science. The journal Pattern Recognition, established half a century ago during the early days of computer science, has since grown significantly in scope and influence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


