{"title":"滑块的谐响应及刚塑性辅助单元的Eurocode_8公式","authors":"P. Labbé, P. Su","doi":"10.1007/s10518-025-02240-8","DOIUrl":null,"url":null,"abstract":"<div><p>For Eurocode_8 as well as for other similar design standards, acceptance criteria are based on the concept of ductility capacity of structures or structural elements. However, in the process of Eurocode_8 generation, an issue was raised because the concept is not adequate for rigid-plastic behaviour, as exhibited by some ancillary elements. Consequently, a specific formula was introduced in the code to deal with this situation. The purpose of this communication is to present the scientific background of this formula. In a first step, the response of a sliding block, with Coulomb friction model, on a support animated with a harmonic motion is considered. Three regimes of response are identified, designated by stick regime, stick-slip regime (sliding phases separated by sicking phases), and slip-slip regime. Considering a non-dimensional input motion level, <span>\\(\\lambda \\)</span>, with <span>\\(\\lambda = 1\\)</span> at the transition between stick and stick-slip regimes, it is analytically established that the slip-slip regime is attained for <span>\\({\\lambda _1} = 1.862\\)</span>. Concurrently, a non-dimensional sliding <span>\\(H_{\\text{ }}\\left( \\lambda \\right)\\)</span> is introduced, an expression of it established for <span>\\(\\lambda < {\\lambda _1}\\)</span>, and turned into the Eurocode_8 formula. In a second step, the same approach is applied, considering a set of 100 natural accelerograms. For every of them, the friction coefficient is calibrated so that the stick-slip regimes is attained. Then, <span>\\(\\lambda _1^0\\)</span> is the amplification factor that should be applied on the input motion so that the slip-slip regime is attained. Concurrently, an expression of the induced non-dimensional sliding, <span>\\(H_{\\text{ }}^0\\left( \\lambda \\right)\\)</span>, is established. In a third step, the same approach applies with seismic input motions transferred to floors 2 and 5 of a 5-storey structure. Corresponding <span>\\(\\lambda _1^2\\)</span> and <span>\\(\\lambda _1^5\\)</span> values are identified as well as non-dimensional sliding <span>\\(H_{\\text{ }}^2\\left( \\lambda \\right)\\)</span> and <span>\\(H_{\\text{ }}^5\\left( \\lambda \\right)\\)</span>. Based on steps 2 and 3 outputs, it is eventually concluded that the Eurocode_8 formula need not being amended.</p></div>","PeriodicalId":9364,"journal":{"name":"Bulletin of Earthquake Engineering","volume":"23 13","pages":"5695 - 5711"},"PeriodicalIF":4.1000,"publicationDate":"2025-08-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Harmonic response of sliding blocks and Eurocode_8 formula for rigid-plastic ancillary elements\",\"authors\":\"P. Labbé, P. Su\",\"doi\":\"10.1007/s10518-025-02240-8\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>For Eurocode_8 as well as for other similar design standards, acceptance criteria are based on the concept of ductility capacity of structures or structural elements. However, in the process of Eurocode_8 generation, an issue was raised because the concept is not adequate for rigid-plastic behaviour, as exhibited by some ancillary elements. Consequently, a specific formula was introduced in the code to deal with this situation. The purpose of this communication is to present the scientific background of this formula. In a first step, the response of a sliding block, with Coulomb friction model, on a support animated with a harmonic motion is considered. Three regimes of response are identified, designated by stick regime, stick-slip regime (sliding phases separated by sicking phases), and slip-slip regime. Considering a non-dimensional input motion level, <span>\\\\(\\\\lambda \\\\)</span>, with <span>\\\\(\\\\lambda = 1\\\\)</span> at the transition between stick and stick-slip regimes, it is analytically established that the slip-slip regime is attained for <span>\\\\({\\\\lambda _1} = 1.862\\\\)</span>. Concurrently, a non-dimensional sliding <span>\\\\(H_{\\\\text{ }}\\\\left( \\\\lambda \\\\right)\\\\)</span> is introduced, an expression of it established for <span>\\\\(\\\\lambda < {\\\\lambda _1}\\\\)</span>, and turned into the Eurocode_8 formula. In a second step, the same approach is applied, considering a set of 100 natural accelerograms. For every of them, the friction coefficient is calibrated so that the stick-slip regimes is attained. Then, <span>\\\\(\\\\lambda _1^0\\\\)</span> is the amplification factor that should be applied on the input motion so that the slip-slip regime is attained. Concurrently, an expression of the induced non-dimensional sliding, <span>\\\\(H_{\\\\text{ }}^0\\\\left( \\\\lambda \\\\right)\\\\)</span>, is established. In a third step, the same approach applies with seismic input motions transferred to floors 2 and 5 of a 5-storey structure. Corresponding <span>\\\\(\\\\lambda _1^2\\\\)</span> and <span>\\\\(\\\\lambda _1^5\\\\)</span> values are identified as well as non-dimensional sliding <span>\\\\(H_{\\\\text{ }}^2\\\\left( \\\\lambda \\\\right)\\\\)</span> and <span>\\\\(H_{\\\\text{ }}^5\\\\left( \\\\lambda \\\\right)\\\\)</span>. Based on steps 2 and 3 outputs, it is eventually concluded that the Eurocode_8 formula need not being amended.</p></div>\",\"PeriodicalId\":9364,\"journal\":{\"name\":\"Bulletin of Earthquake Engineering\",\"volume\":\"23 13\",\"pages\":\"5695 - 5711\"},\"PeriodicalIF\":4.1000,\"publicationDate\":\"2025-08-07\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Bulletin of Earthquake Engineering\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10518-025-02240-8\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, GEOLOGICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Bulletin of Earthquake Engineering","FirstCategoryId":"5","ListUrlMain":"https://link.springer.com/article/10.1007/s10518-025-02240-8","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, GEOLOGICAL","Score":null,"Total":0}
Harmonic response of sliding blocks and Eurocode_8 formula for rigid-plastic ancillary elements
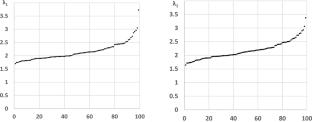
For Eurocode_8 as well as for other similar design standards, acceptance criteria are based on the concept of ductility capacity of structures or structural elements. However, in the process of Eurocode_8 generation, an issue was raised because the concept is not adequate for rigid-plastic behaviour, as exhibited by some ancillary elements. Consequently, a specific formula was introduced in the code to deal with this situation. The purpose of this communication is to present the scientific background of this formula. In a first step, the response of a sliding block, with Coulomb friction model, on a support animated with a harmonic motion is considered. Three regimes of response are identified, designated by stick regime, stick-slip regime (sliding phases separated by sicking phases), and slip-slip regime. Considering a non-dimensional input motion level, \(\lambda \), with \(\lambda = 1\) at the transition between stick and stick-slip regimes, it is analytically established that the slip-slip regime is attained for \({\lambda _1} = 1.862\). Concurrently, a non-dimensional sliding \(H_{\text{ }}\left( \lambda \right)\) is introduced, an expression of it established for \(\lambda < {\lambda _1}\), and turned into the Eurocode_8 formula. In a second step, the same approach is applied, considering a set of 100 natural accelerograms. For every of them, the friction coefficient is calibrated so that the stick-slip regimes is attained. Then, \(\lambda _1^0\) is the amplification factor that should be applied on the input motion so that the slip-slip regime is attained. Concurrently, an expression of the induced non-dimensional sliding, \(H_{\text{ }}^0\left( \lambda \right)\), is established. In a third step, the same approach applies with seismic input motions transferred to floors 2 and 5 of a 5-storey structure. Corresponding \(\lambda _1^2\) and \(\lambda _1^5\) values are identified as well as non-dimensional sliding \(H_{\text{ }}^2\left( \lambda \right)\) and \(H_{\text{ }}^5\left( \lambda \right)\). Based on steps 2 and 3 outputs, it is eventually concluded that the Eurocode_8 formula need not being amended.
期刊介绍:
Bulletin of Earthquake Engineering presents original, peer-reviewed papers on research related to the broad spectrum of earthquake engineering. The journal offers a forum for presentation and discussion of such matters as European damaging earthquakes, new developments in earthquake regulations, and national policies applied after major seismic events, including strengthening of existing buildings.
Coverage includes seismic hazard studies and methods for mitigation of risk; earthquake source mechanism and strong motion characterization and their use for engineering applications; geological and geotechnical site conditions under earthquake excitations; cyclic behavior of soils; analysis and design of earth structures and foundations under seismic conditions; zonation and microzonation methodologies; earthquake scenarios and vulnerability assessments; earthquake codes and improvements, and much more.
This is the Official Publication of the European Association for Earthquake Engineering.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


