Michael Tim-Yun Ong, Chuan He, Wei Chai, Rex Wang-Fung Mak, Cham-Kit Wong, Gloria Yan-Ting Lam, Tsz Lung Choi, Patrick Shu-Hang Yung
{"title":"开放平台基于图像的机器人辅助全膝关节置换术的手术准确性:一项多中心试验。","authors":"Michael Tim-Yun Ong, Chuan He, Wei Chai, Rex Wang-Fung Mak, Cham-Kit Wong, Gloria Yan-Ting Lam, Tsz Lung Choi, Patrick Shu-Hang Yung","doi":"10.1186/s42836-025-00334-x","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>Implant malalignment in total knee arthroplasty (TKA) correlates with poor outcomes, and robotic-assisted systems aim to improve precision. While closed-platform robotic systems dominate the market, their restriction to proprietary implants limits surgical flexibility. This study evaluates the radiological accuracy of an open-platform robotic system (Yuanhua KUNWU) across four TKA implant designs.</p><p><strong>Methods: </strong>A multi-centre retrospective analysis of 129 robotic-assisted TKAs (Zhengtian Irene, n = 60; DePuy Synthes Attune, n = 32; Zimmer Biomet Persona, n = 20; Smith & Nephew Legion, n = 17) was conducted. Patients with end-stage osteoarthritis (Kellgren-Lawrence grade 3-4) were included, while those with prior knee surgery or complex anatomy were excluded (n = 15). A total of 114 pre-operative and post-operative alignment (hip-knee-ankle angle [HKA], femoral and tibial component coronal angles [FCCA, TCCA], posterior tibial slope [PTS]) were measured on radiographs by two independent reviewers. Interobserver reliability (intra-class correlation [ICC], Cronbach's α) and deviations from planned alignment (paired t-tests) were analysed. Acceptability was defined as ≤ 3° deviation.</p><p><strong>Results: </strong>Interobserver reliability was excellent (ICC > 0.77, Cronbach's α > 0.87 for all parameters). Mean post-operative deviations from planned alignment were clinically small: HKA (+1.32°, P < 0.001), FCCA (-0.55°, P < 0.001), TCCA (+0.19°, P = 0.097), and PTS (-0.42°, P = 0.018). All mean differences were within the 3° acceptability threshold. Subgroup analysis of pre- and post-operative alignment between implant types also showed deviations of < 3°.</p><p><strong>Conclusions: </strong>The KUNWU open-platform robotic system achieved high radiological accuracy across four implant designs, with alignment deviations < 1.5°. This suggests open-platform robotics can provide implant versatility without compromising precision. Further studies regarding the assessment of long-term clinical and patient-reported outcomes and comparison with closed-platform systems are warranted.</p>","PeriodicalId":52831,"journal":{"name":"Arthroplasty","volume":"7 1","pages":"50"},"PeriodicalIF":4.3000,"publicationDate":"2025-10-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12502208/pdf/","citationCount":"0","resultStr":"{\"title\":\"Surgical accuracy of open platform image-based robotic-assisted total knee arthroplasty across different implants: a multicentre trial.\",\"authors\":\"Michael Tim-Yun Ong, Chuan He, Wei Chai, Rex Wang-Fung Mak, Cham-Kit Wong, Gloria Yan-Ting Lam, Tsz Lung Choi, Patrick Shu-Hang Yung\",\"doi\":\"10.1186/s42836-025-00334-x\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Background: </strong>Implant malalignment in total knee arthroplasty (TKA) correlates with poor outcomes, and robotic-assisted systems aim to improve precision. While closed-platform robotic systems dominate the market, their restriction to proprietary implants limits surgical flexibility. This study evaluates the radiological accuracy of an open-platform robotic system (Yuanhua KUNWU) across four TKA implant designs.</p><p><strong>Methods: </strong>A multi-centre retrospective analysis of 129 robotic-assisted TKAs (Zhengtian Irene, n = 60; DePuy Synthes Attune, n = 32; Zimmer Biomet Persona, n = 20; Smith & Nephew Legion, n = 17) was conducted. Patients with end-stage osteoarthritis (Kellgren-Lawrence grade 3-4) were included, while those with prior knee surgery or complex anatomy were excluded (n = 15). A total of 114 pre-operative and post-operative alignment (hip-knee-ankle angle [HKA], femoral and tibial component coronal angles [FCCA, TCCA], posterior tibial slope [PTS]) were measured on radiographs by two independent reviewers. Interobserver reliability (intra-class correlation [ICC], Cronbach's α) and deviations from planned alignment (paired t-tests) were analysed. Acceptability was defined as ≤ 3° deviation.</p><p><strong>Results: </strong>Interobserver reliability was excellent (ICC > 0.77, Cronbach's α > 0.87 for all parameters). Mean post-operative deviations from planned alignment were clinically small: HKA (+1.32°, P < 0.001), FCCA (-0.55°, P < 0.001), TCCA (+0.19°, P = 0.097), and PTS (-0.42°, P = 0.018). All mean differences were within the 3° acceptability threshold. Subgroup analysis of pre- and post-operative alignment between implant types also showed deviations of < 3°.</p><p><strong>Conclusions: </strong>The KUNWU open-platform robotic system achieved high radiological accuracy across four implant designs, with alignment deviations < 1.5°. This suggests open-platform robotics can provide implant versatility without compromising precision. Further studies regarding the assessment of long-term clinical and patient-reported outcomes and comparison with closed-platform systems are warranted.</p>\",\"PeriodicalId\":52831,\"journal\":{\"name\":\"Arthroplasty\",\"volume\":\"7 1\",\"pages\":\"50\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2025-10-07\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12502208/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Arthroplasty\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://doi.org/10.1186/s42836-025-00334-x\",\"RegionNum\":4,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ORTHOPEDICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Arthroplasty","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.1186/s42836-025-00334-x","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ORTHOPEDICS","Score":null,"Total":0}
引用次数: 0
摘要
背景:全膝关节置换术(TKA)中假体错位与不良预后相关,机器人辅助系统旨在提高精度。虽然封闭平台机器人系统在市场上占据主导地位,但它们对专有植入物的限制限制了手术的灵活性。本研究评估了开放平台机器人系统(Yuanhua KUNWU)在四种TKA种植体设计中的放射学准确性。方法:对129例机器人辅助tka (Zhengtian Irene, n = 60; DePuy Synthes tune, n = 32; Zimmer Biomet Persona, n = 20; Smith & Nephew Legion, n = 17)进行多中心回顾性分析。终末期骨关节炎患者(Kellgren-Lawrence分级3-4)被纳入研究,而既往膝关节手术或复杂解剖结构的患者被排除(n = 15)。由两名独立评论者在x线片上测量术前和术后的114个对齐(髋关节-膝关节-踝关节角[HKA],股骨和胫骨成分冠状角[FCCA, TCCA],胫骨后斜度[PTS])。分析了观察者间信度(类内相关性[ICC], Cronbach's α)和计划对齐偏差(配对t检验)。可接受性定义为偏差≤3°。结果:观察者间信度极好(所有参数的ICC >为0.77,Cronbach's α >为0.87)。术后与计划对准的平均偏差临床上较小:HKA(+1.32°,P)结论:KUNWU开放式平台机器人系统在四种种植体设计中均具有较高的放射学精度,存在对准偏差
Surgical accuracy of open platform image-based robotic-assisted total knee arthroplasty across different implants: a multicentre trial.
Background: Implant malalignment in total knee arthroplasty (TKA) correlates with poor outcomes, and robotic-assisted systems aim to improve precision. While closed-platform robotic systems dominate the market, their restriction to proprietary implants limits surgical flexibility. This study evaluates the radiological accuracy of an open-platform robotic system (Yuanhua KUNWU) across four TKA implant designs.
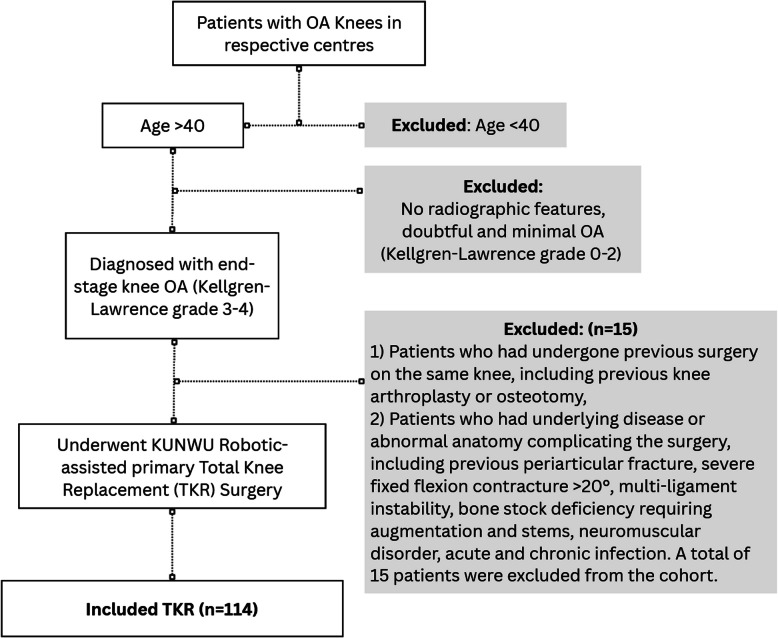
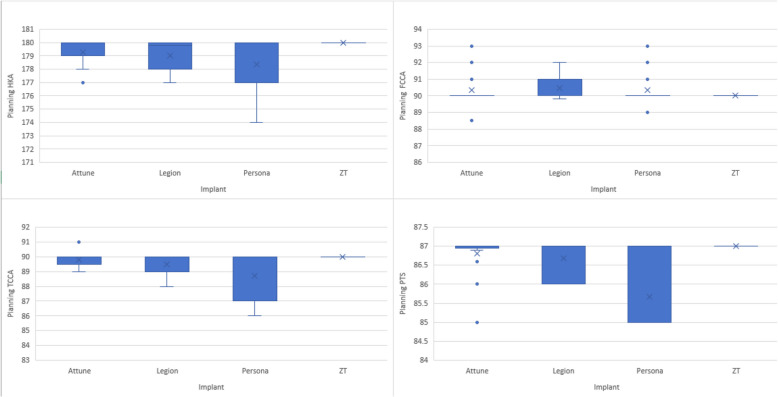
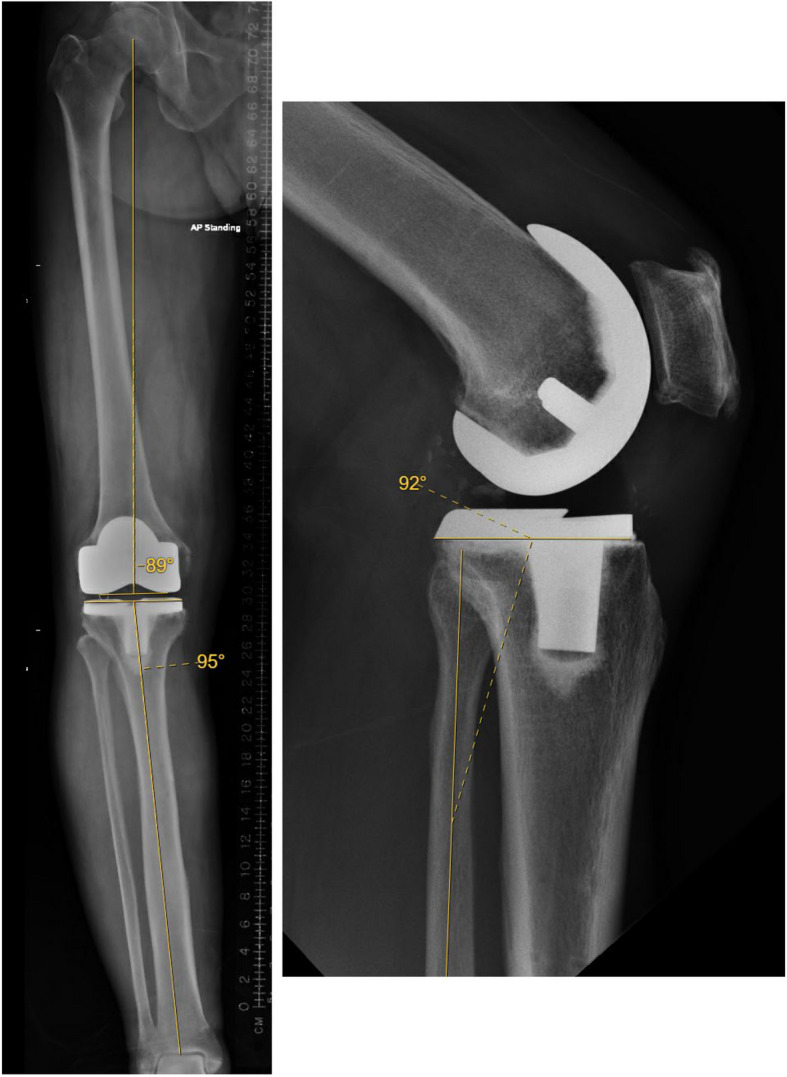
Methods: A multi-centre retrospective analysis of 129 robotic-assisted TKAs (Zhengtian Irene, n = 60; DePuy Synthes Attune, n = 32; Zimmer Biomet Persona, n = 20; Smith & Nephew Legion, n = 17) was conducted. Patients with end-stage osteoarthritis (Kellgren-Lawrence grade 3-4) were included, while those with prior knee surgery or complex anatomy were excluded (n = 15). A total of 114 pre-operative and post-operative alignment (hip-knee-ankle angle [HKA], femoral and tibial component coronal angles [FCCA, TCCA], posterior tibial slope [PTS]) were measured on radiographs by two independent reviewers. Interobserver reliability (intra-class correlation [ICC], Cronbach's α) and deviations from planned alignment (paired t-tests) were analysed. Acceptability was defined as ≤ 3° deviation.
Results: Interobserver reliability was excellent (ICC > 0.77, Cronbach's α > 0.87 for all parameters). Mean post-operative deviations from planned alignment were clinically small: HKA (+1.32°, P < 0.001), FCCA (-0.55°, P < 0.001), TCCA (+0.19°, P = 0.097), and PTS (-0.42°, P = 0.018). All mean differences were within the 3° acceptability threshold. Subgroup analysis of pre- and post-operative alignment between implant types also showed deviations of < 3°.
Conclusions: The KUNWU open-platform robotic system achieved high radiological accuracy across four implant designs, with alignment deviations < 1.5°. This suggests open-platform robotics can provide implant versatility without compromising precision. Further studies regarding the assessment of long-term clinical and patient-reported outcomes and comparison with closed-platform systems are warranted.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


