通过选择性肌肉收缩驱动生物混合机器人的多极电极
IF 3.7
1区 化学
Q1 CHEMISTRY, ANALYTICAL
引用次数: 0
摘要
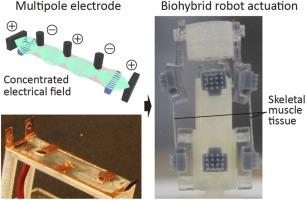
结合活体肌肉组织和合成结构的生物混合机器人已经成为研究类动物运动和开发软机器人系统的平台。由于骨骼肌组织通过电刺激具有高度可控性,因此作为致动器特别有吸引力。然而,在传统的场电刺激中,电信号往往会通过导电培养基分散,经常引起非目标肌肉组织的无意激活。为了解决这一限制,我们开发了一种多极电极,能够将电场集中在目标肌肉周围的局部区域内。在多极电极中,增加电极的数量可以改善电场的收敛性,减少不必要的信号扩散到周围区域。为了证明多极电极的实用性,我们构建了一个由四个培养骨骼肌组织和四个多极电极组成的类眼生物混合机器人。通过连续和选择性的刺激,机器人成功地完成了复杂的定向运动,包括椭圆轨迹。这些结果证实,多极电极可以实现对培养肌肉组织的非接触、空间精确刺激,并为提高生物混合机器人系统的功能复杂性和自由度提供了一种有前途的方法。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Multipole electrodes for driving biohybrid robots via selective muscle contraction
Biohybrid robots that integrate living muscle tissues with synthetic structures have emerged as platforms for studying animal-like movements and developing soft robotic systems. Skeletal muscle tissues are particularly attractive as actuators due to their high controllability through electrical stimulation. However, in conventional field electrical stimulation, electrical signals tend to disperse through the conductive culture medium, often causing unintentional activation of non-target muscle tissues. To address this limitation, we developed a multipole electrode capable of concentrating the electric field within a localized region around the target muscle. In the multipole electrode, increasing the number of electrode poles improved electric field convergence and reduced unwanted signal spread into surrounding areas. As a demonstration of the practical applicability of the multipole electrode, we constructed an ocular-like biohybrid robot composed of four cultured skeletal muscle tissues and four multipole electrodes. Through sequential and selective stimulation, the robot successfully performed complex and directional motions, including elliptical trajectories. These results confirm that the multipole electrode enables non-contact, spatially precise stimulation of cultured muscle tissues and offers a promising approach for enhancing the functional complexity and degrees of freedom in biohybrid robotic systems.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Sensors and Actuators B: Chemical
工程技术-电化学
CiteScore
14.60
自引率
11.90%
发文量
1776
审稿时长
3.2 months
期刊介绍:
Sensors & Actuators, B: Chemical is an international journal focused on the research and development of chemical transducers. It covers chemical sensors and biosensors, chemical actuators, and analytical microsystems. The journal is interdisciplinary, aiming to publish original works showcasing substantial advancements beyond the current state of the art in these fields, with practical applicability to solving meaningful analytical problems. Review articles are accepted by invitation from an Editor of the journal.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


